SolidWorks导出机械臂URDF
1. 插件和工具
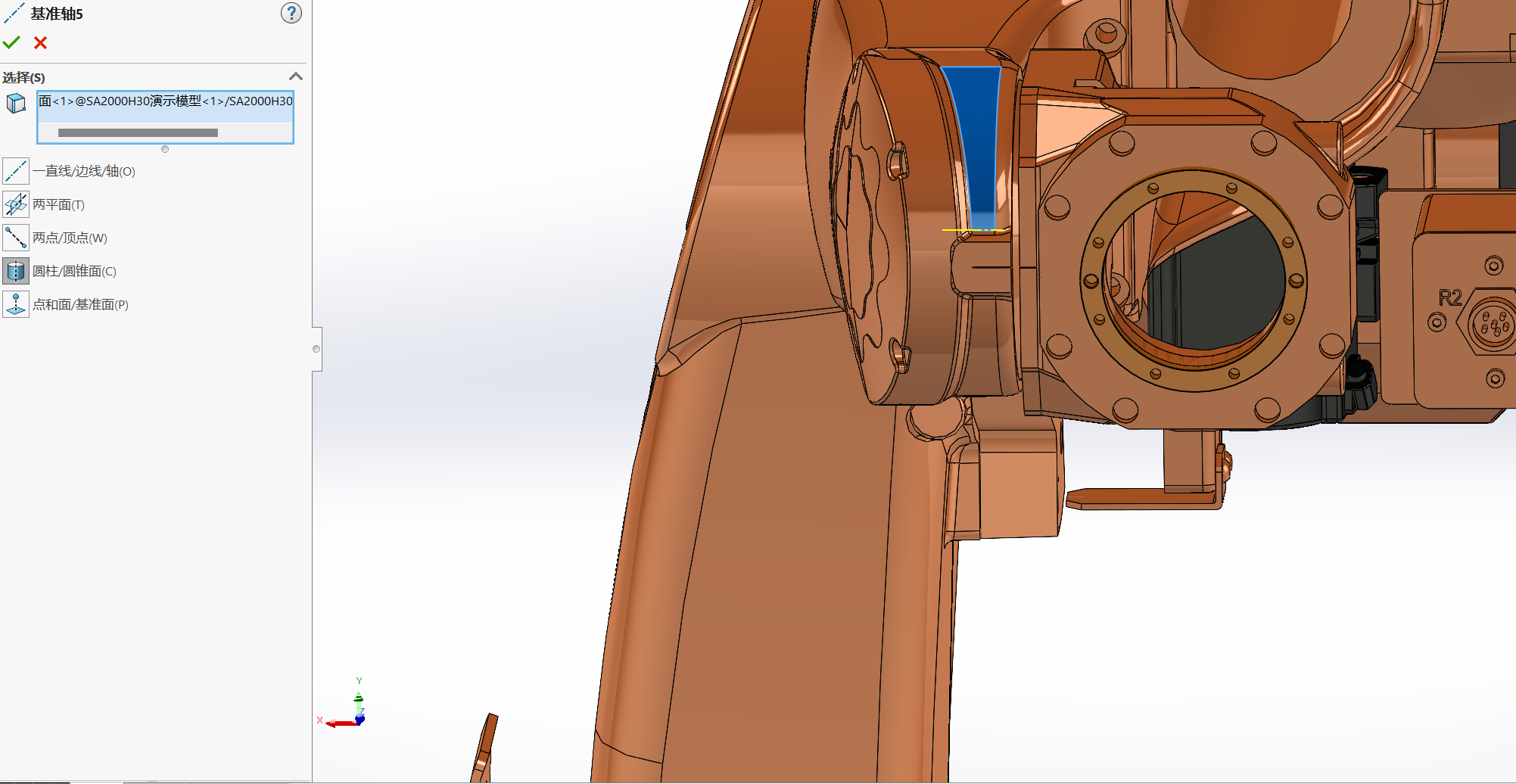
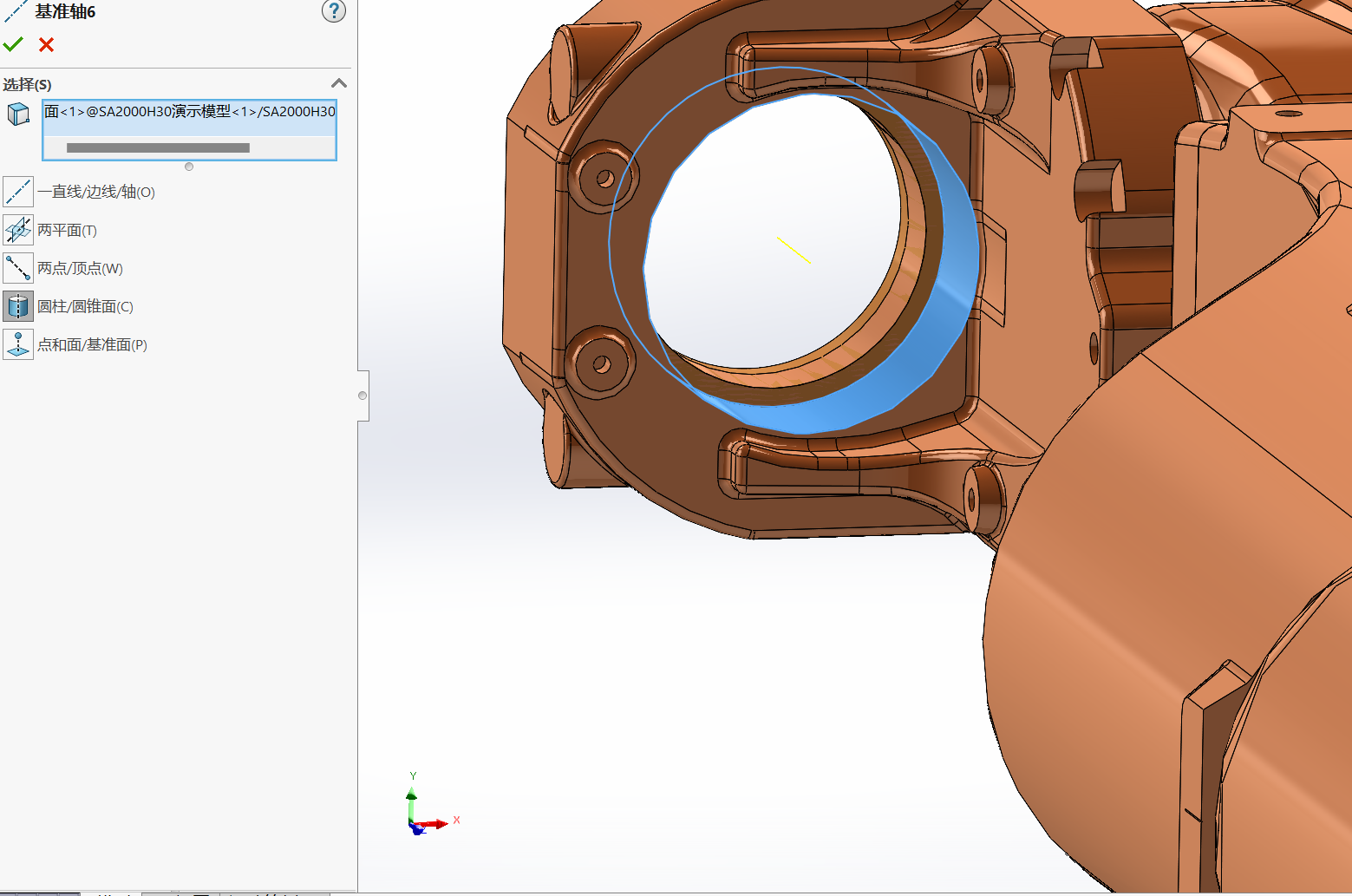
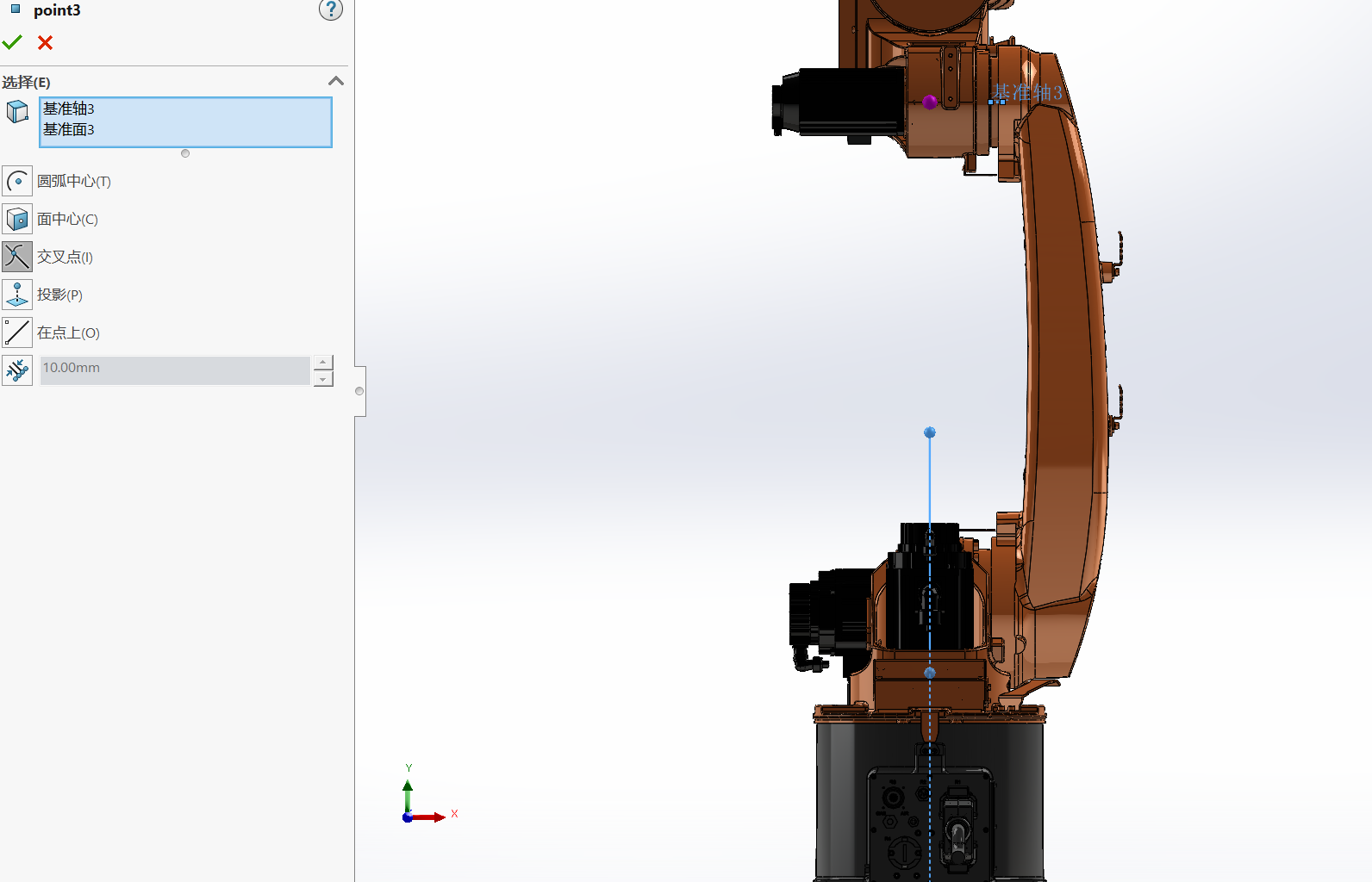
2. 配置基准轴和基准点
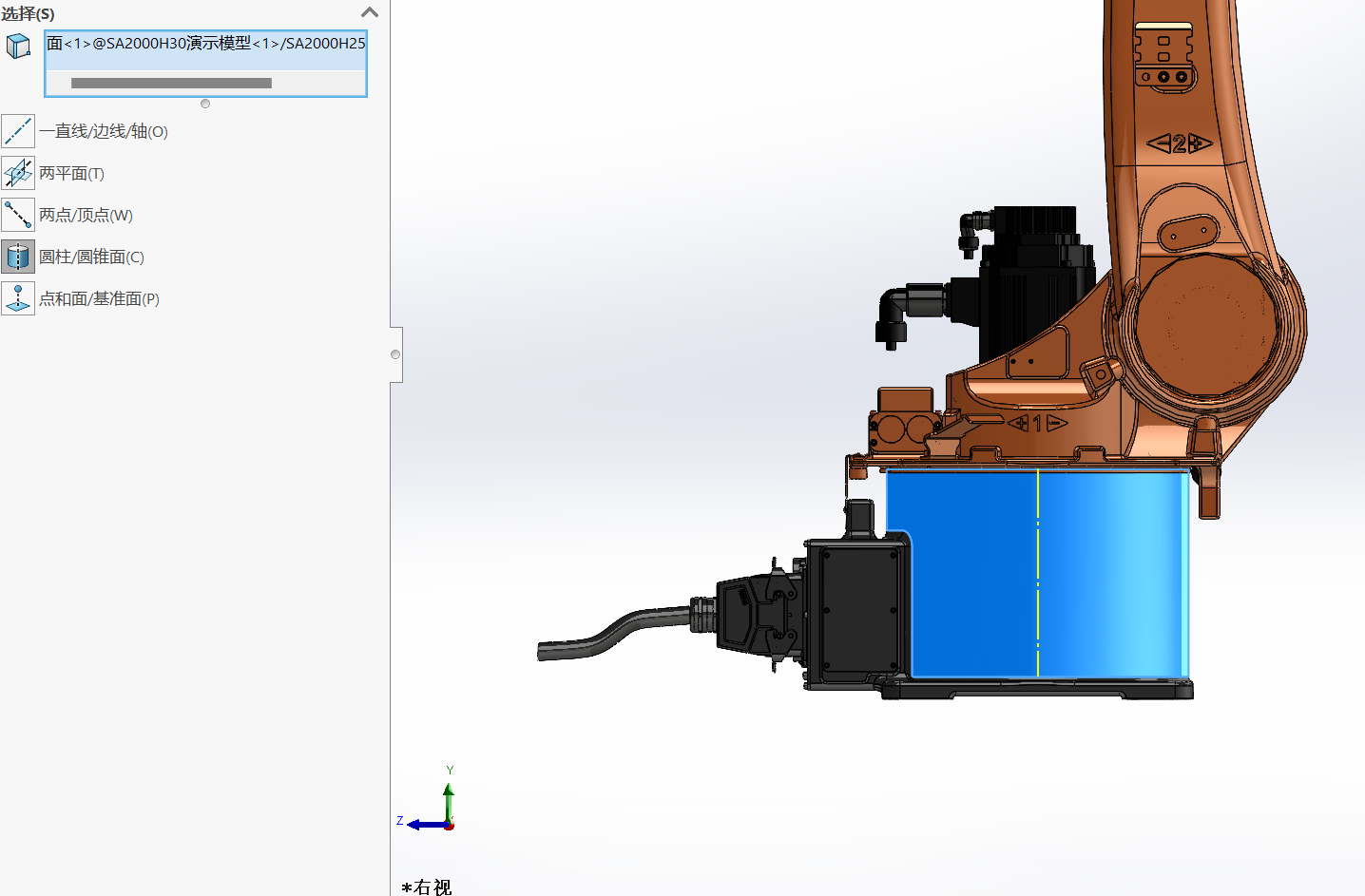
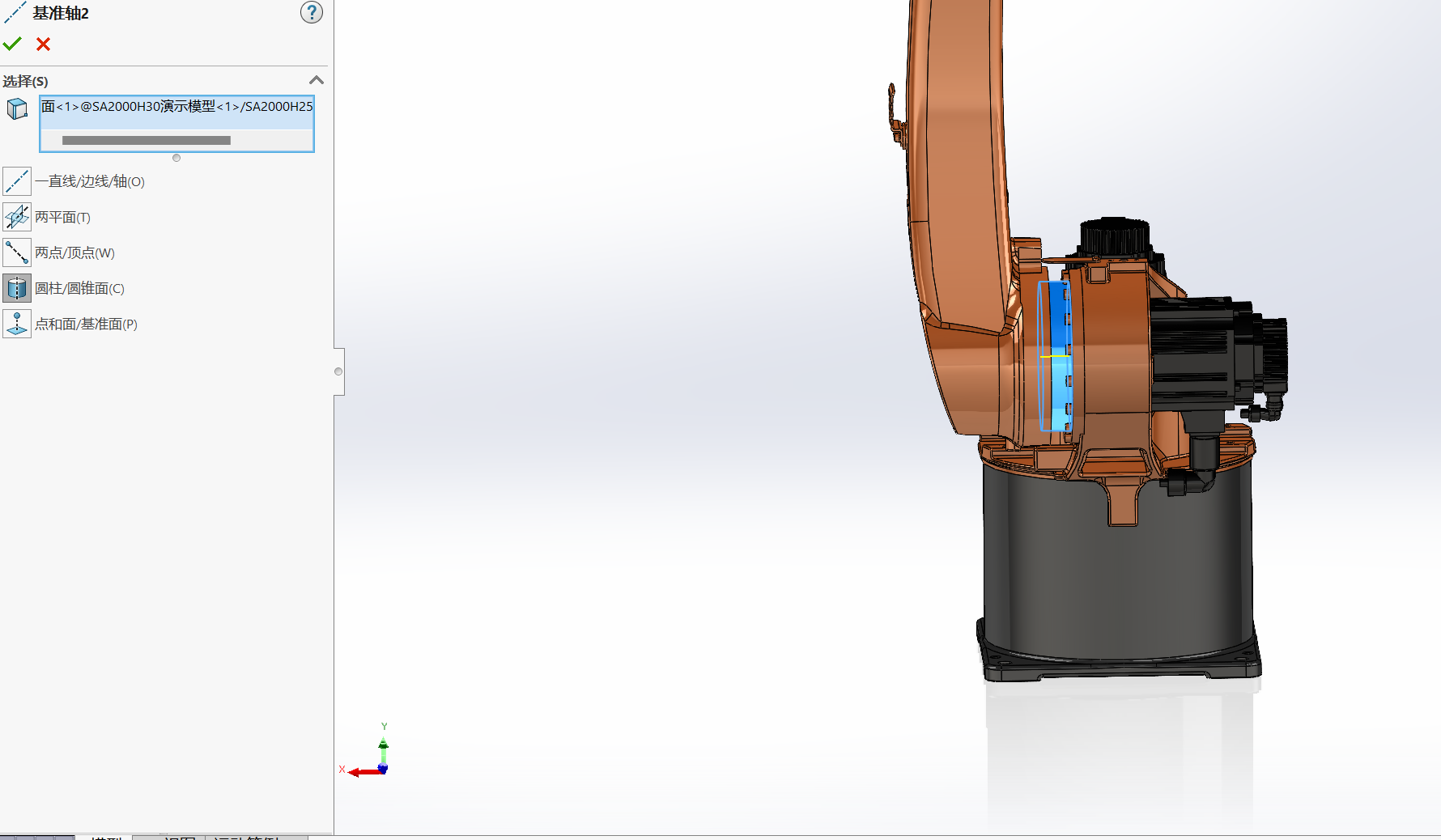
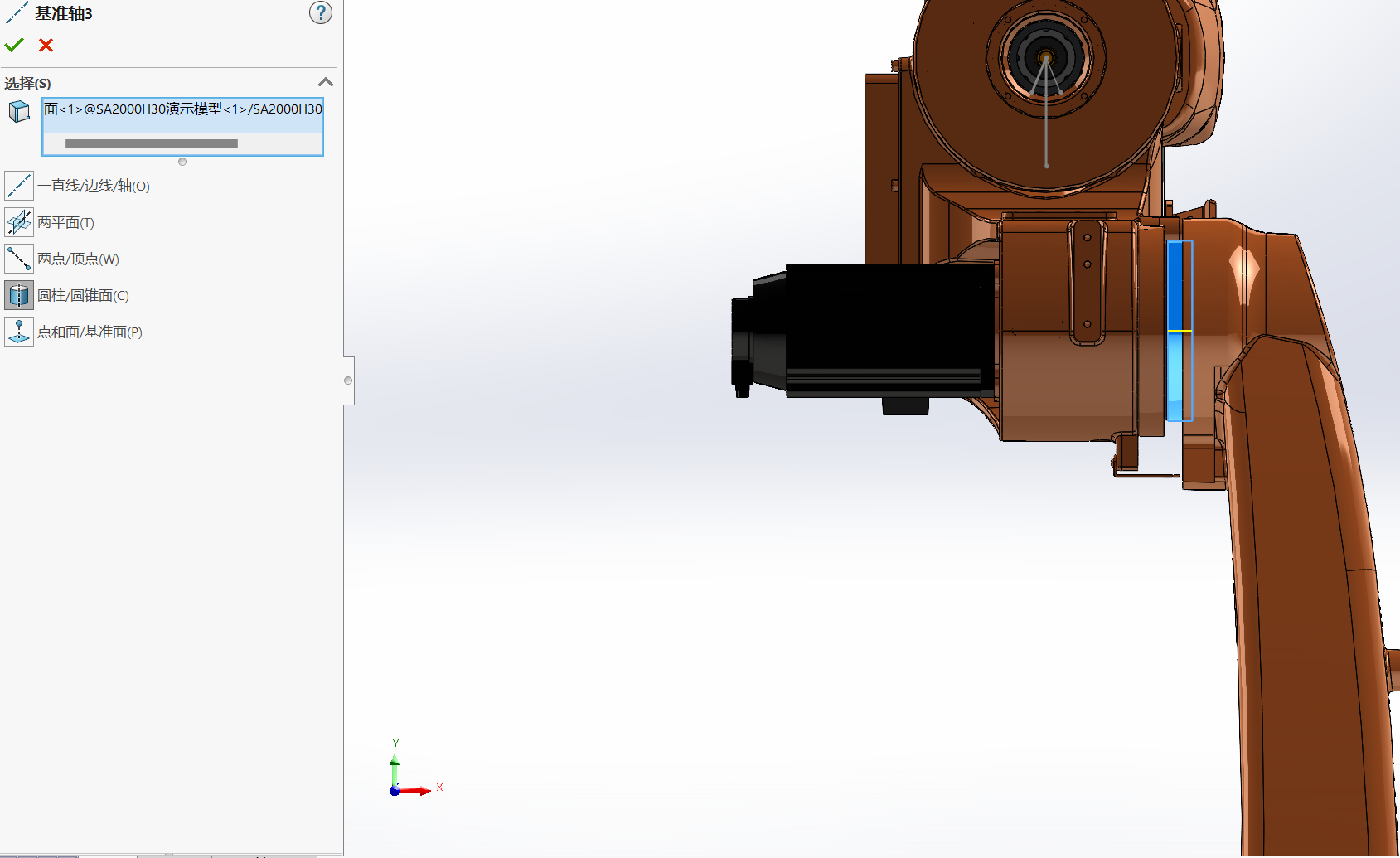
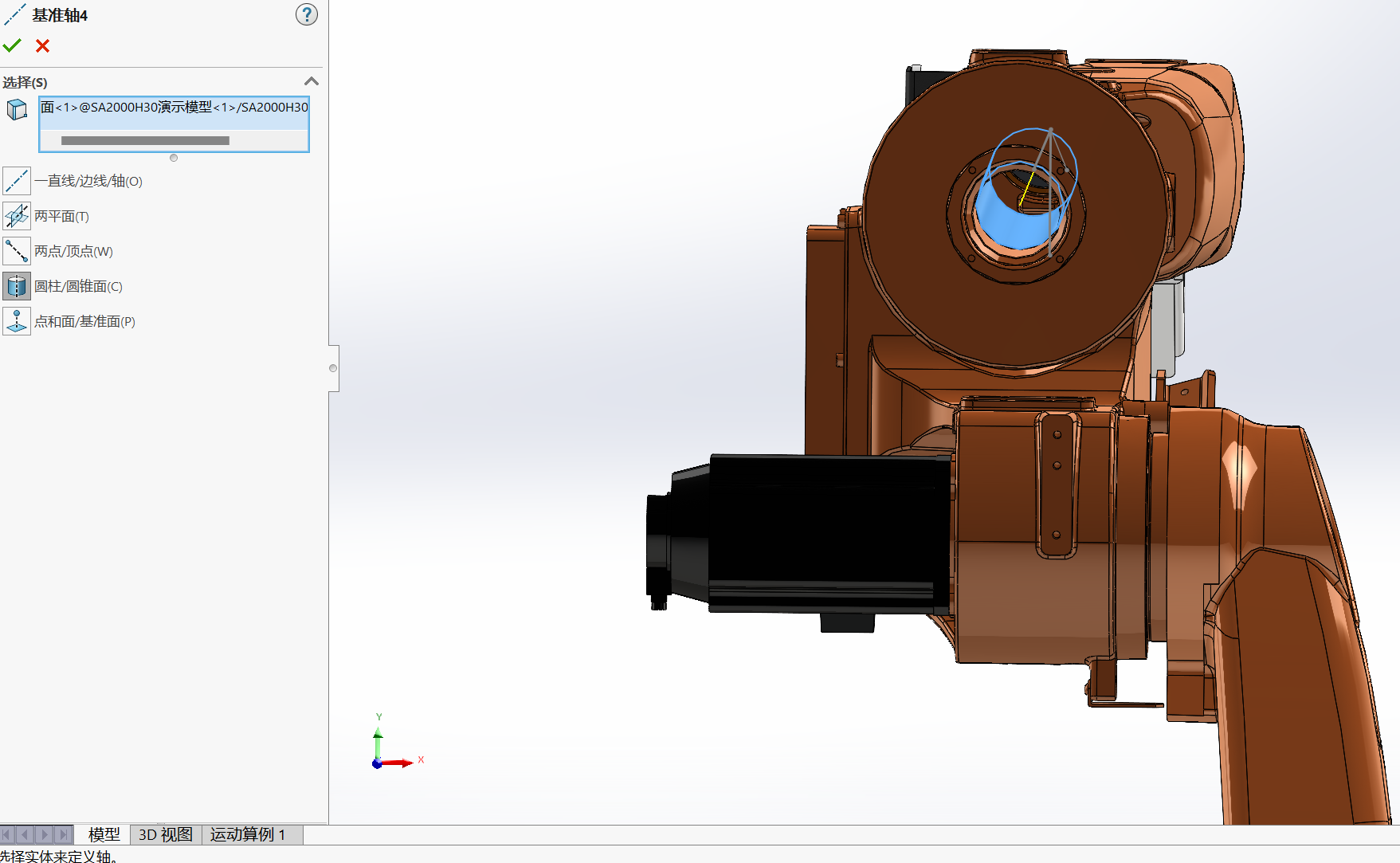
配置基准轴
基准轴1基准轴2基准轴3基准轴4基准轴5基准轴6
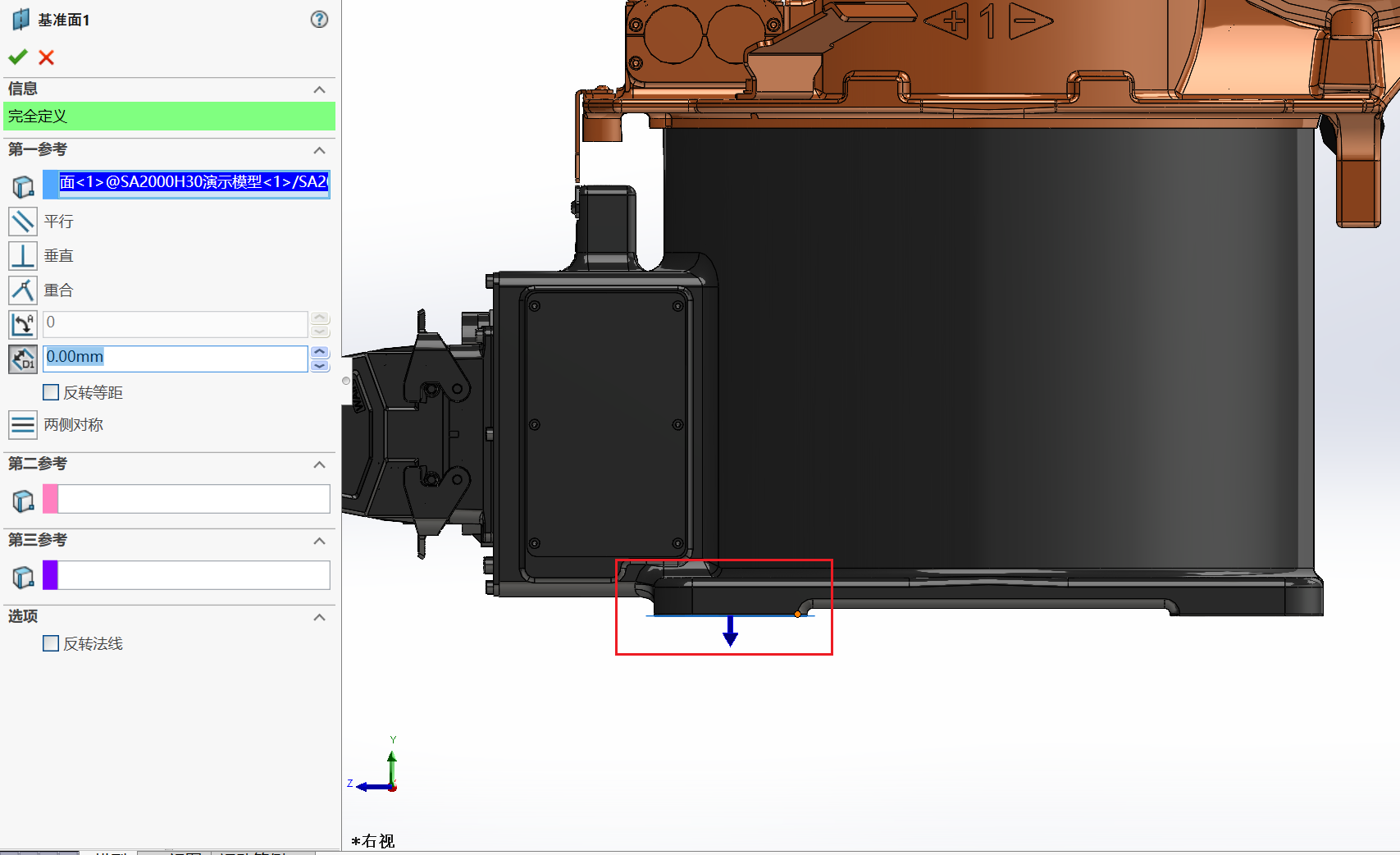
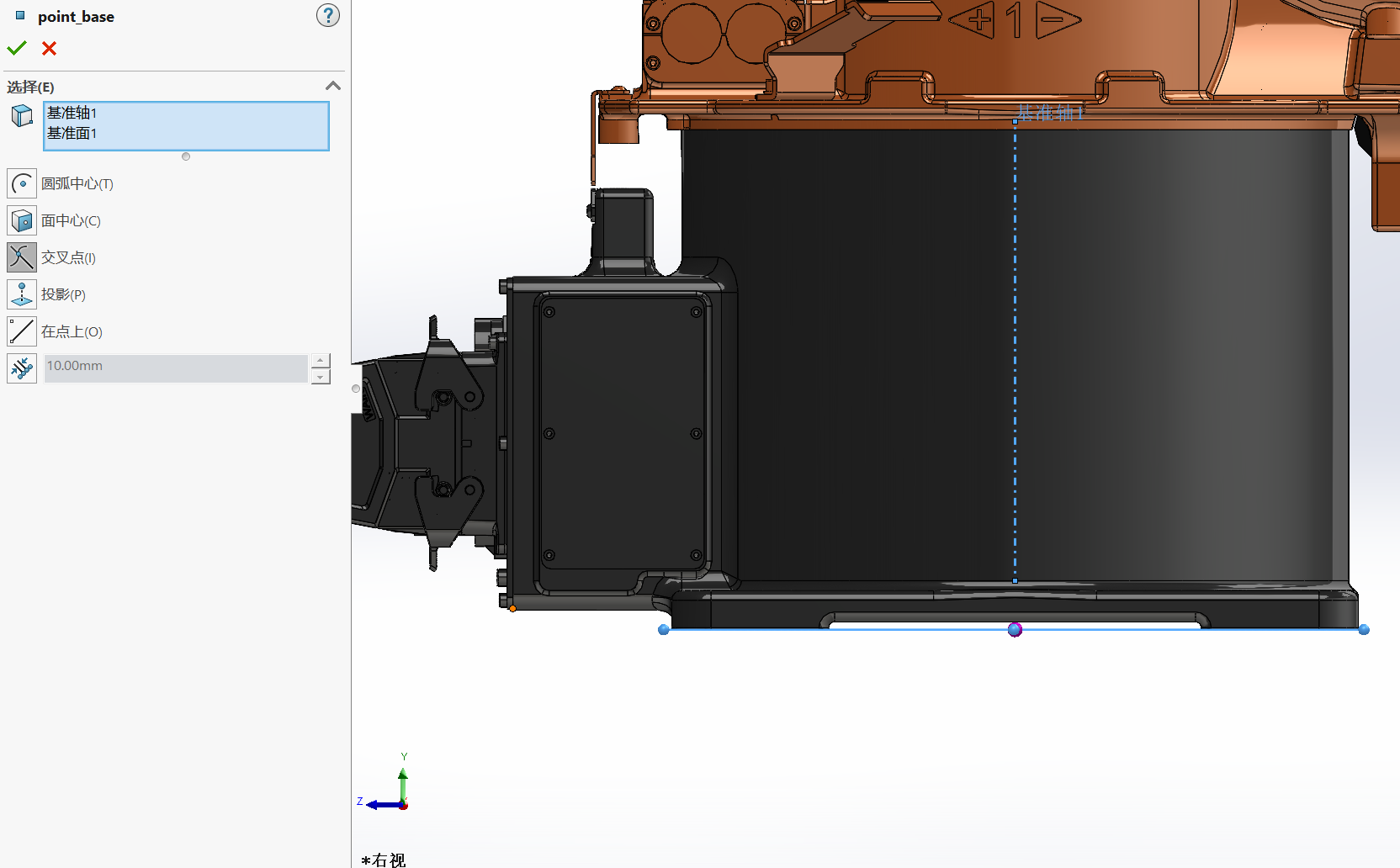
配置基准点
基准点
base_point注意:每个机器人的
base_point需要根据厂家提供的信息来确定辅助面
基准面1
base_point
基准点
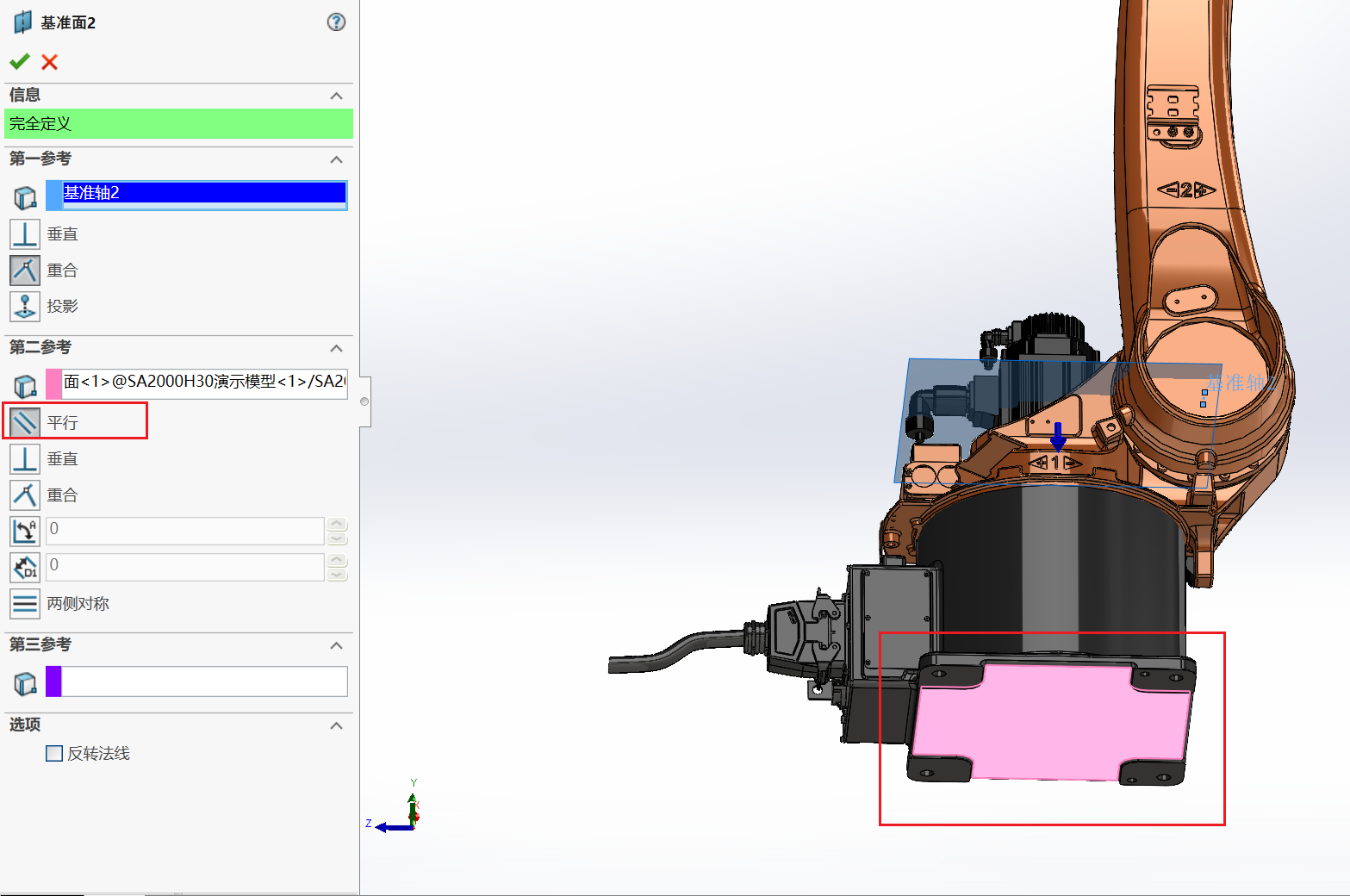
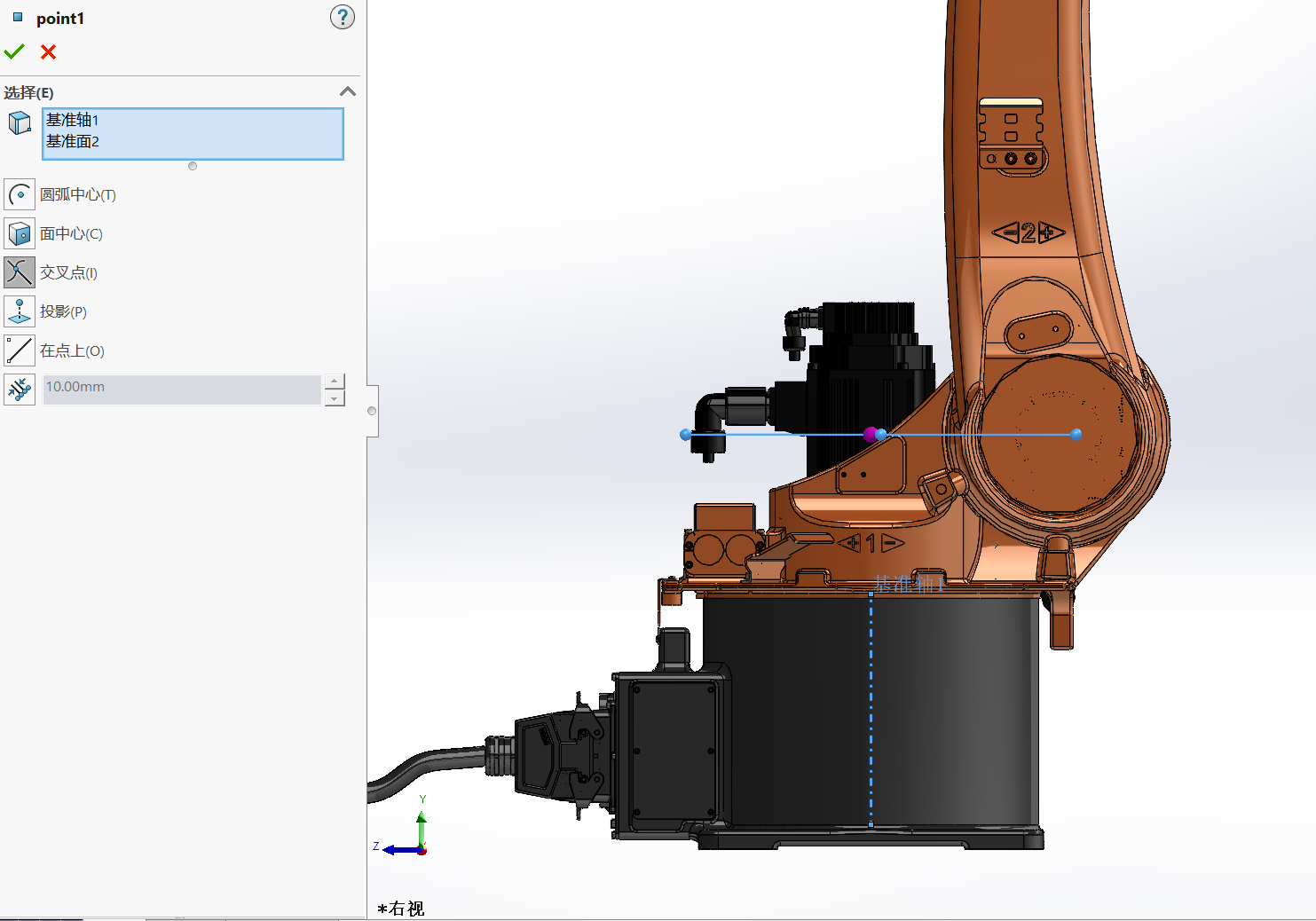
point1辅助面
基准面2
point1
基准点
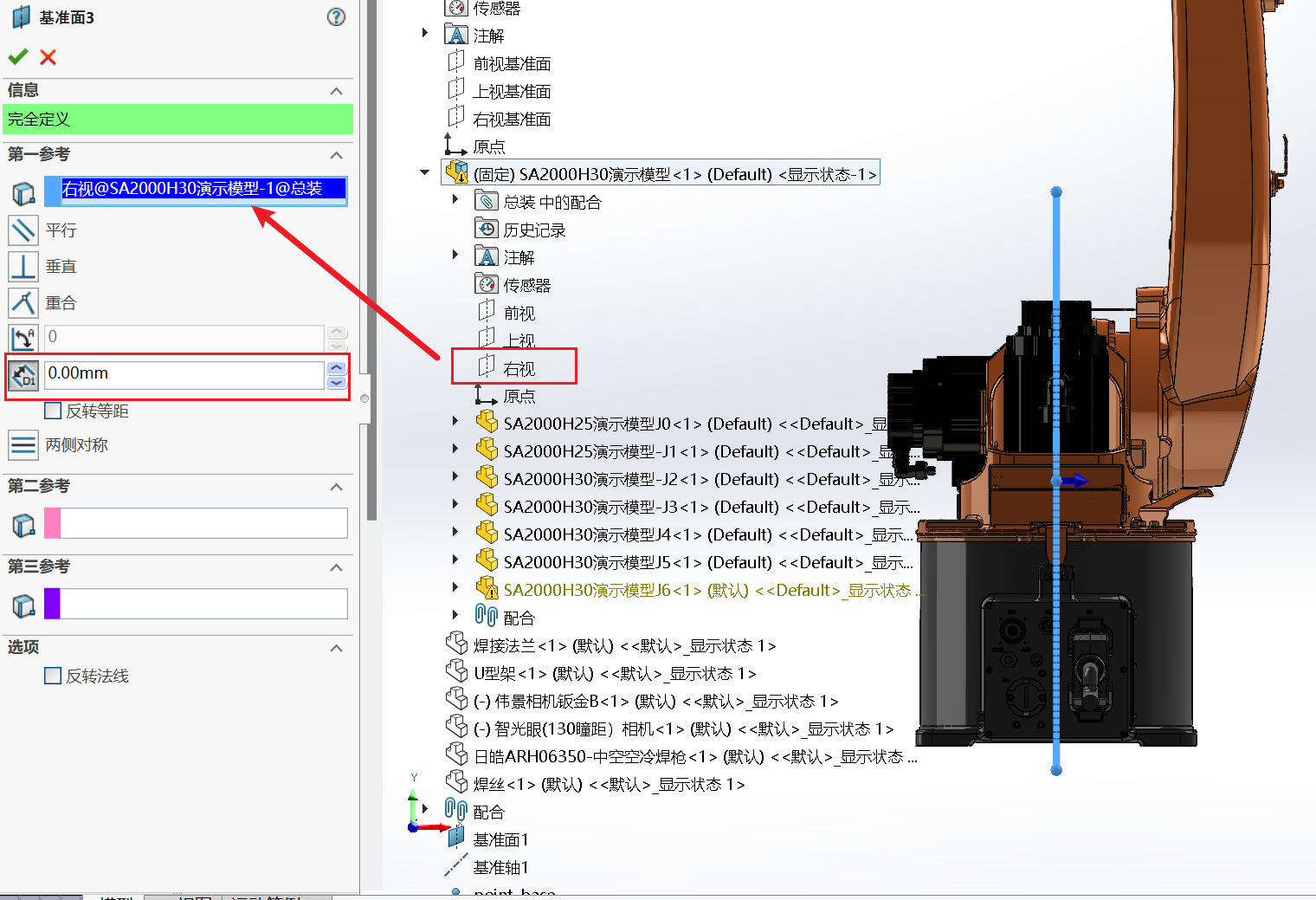
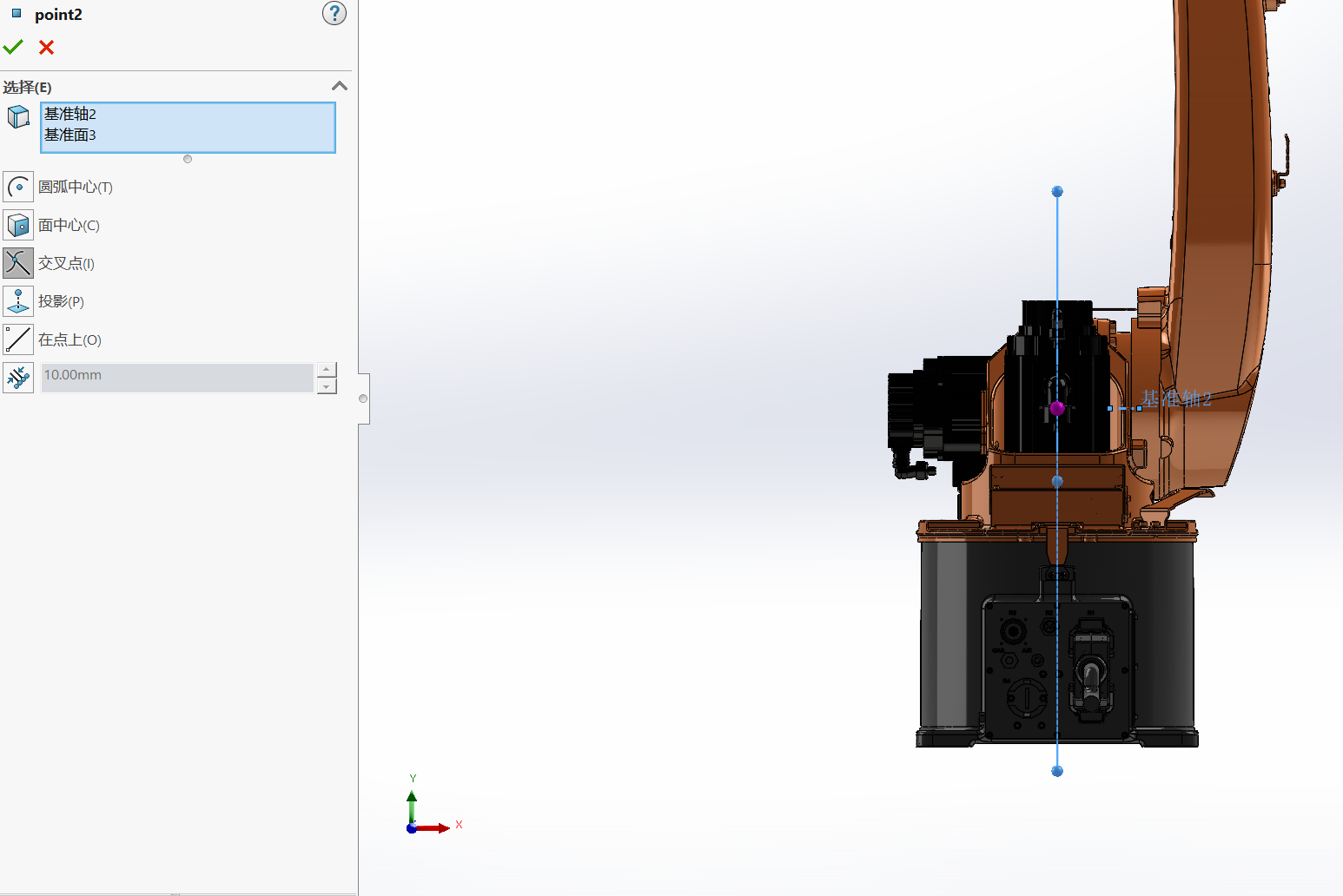
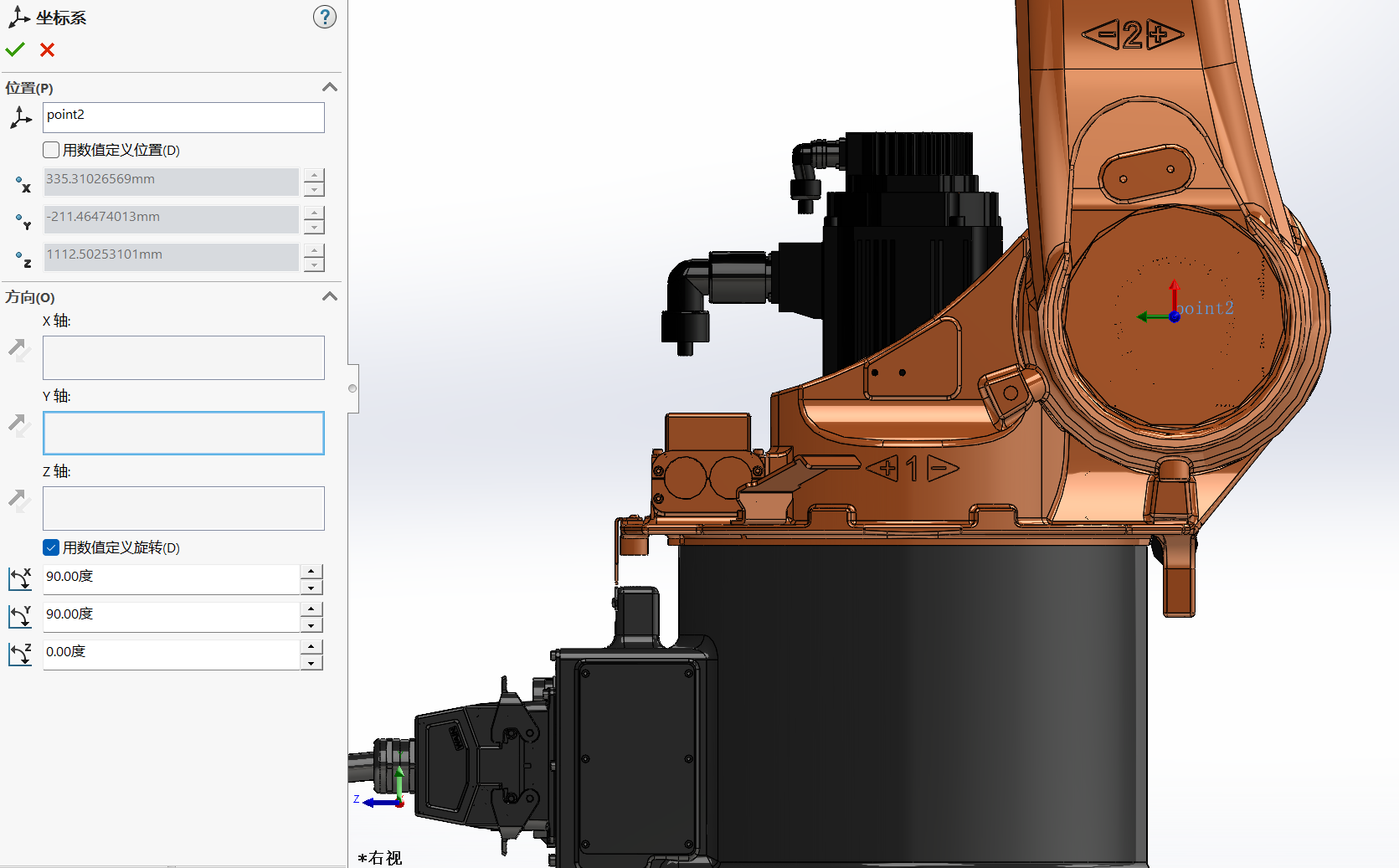
point2辅助面
基准面3
point2
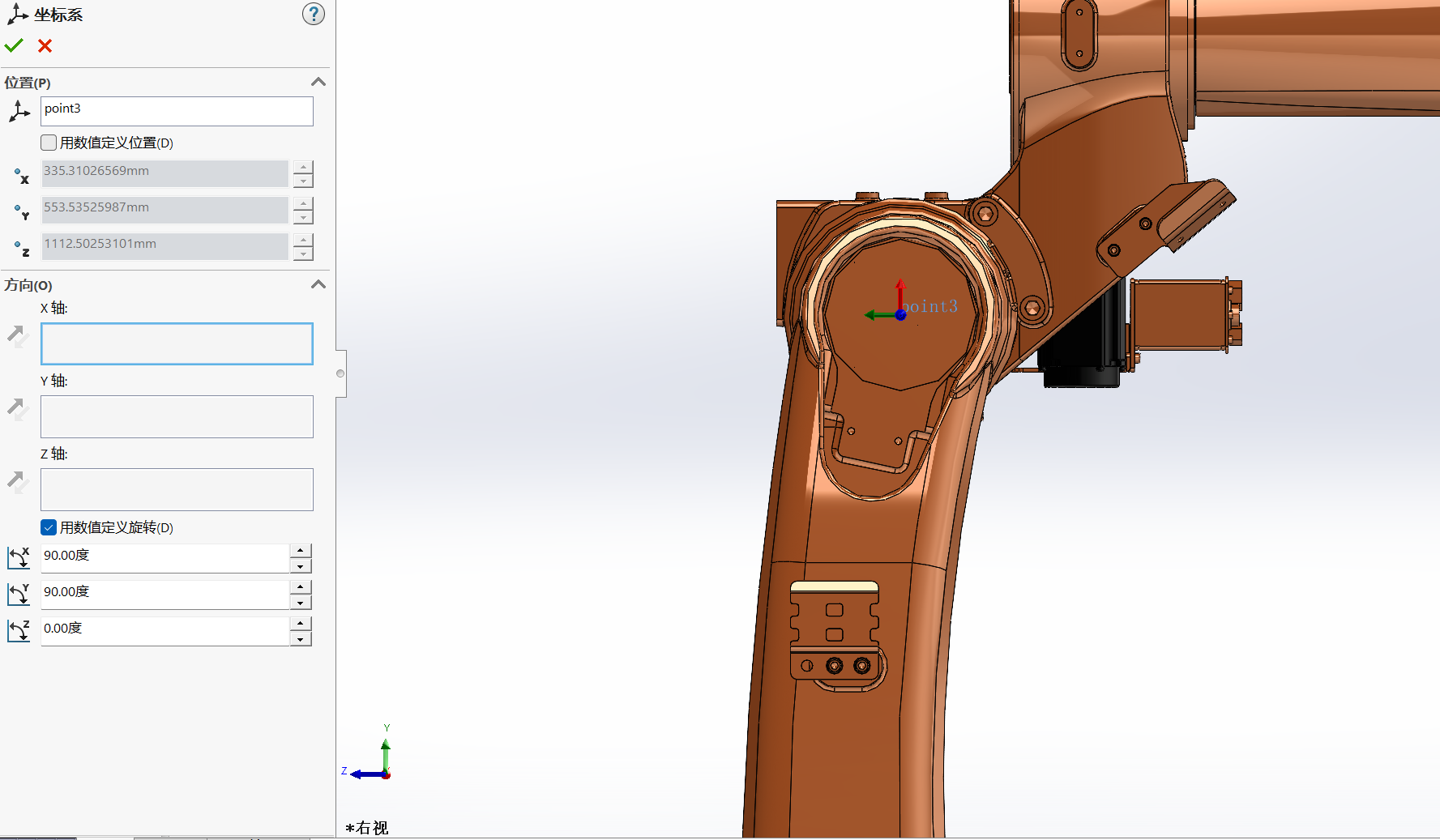
基准点
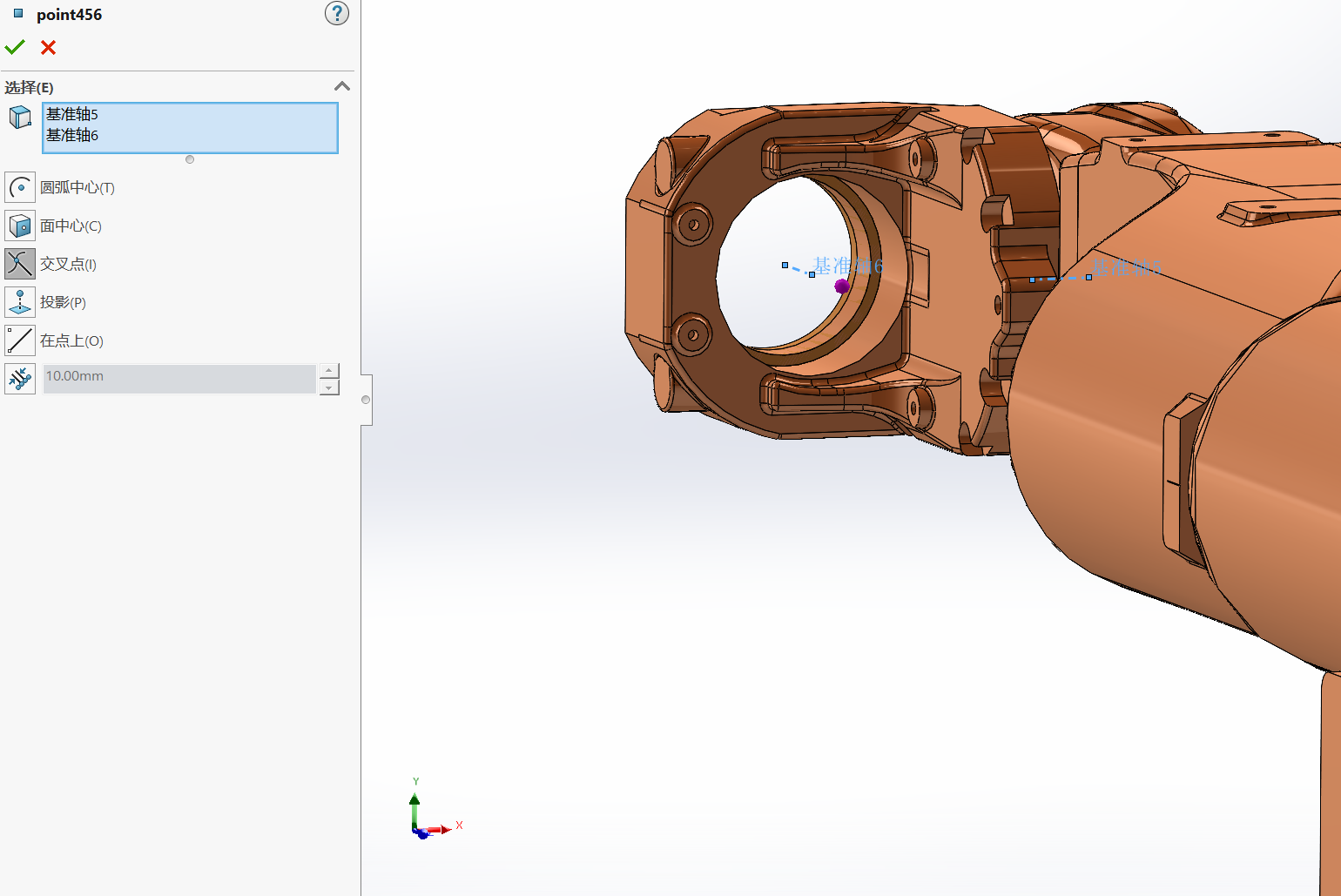
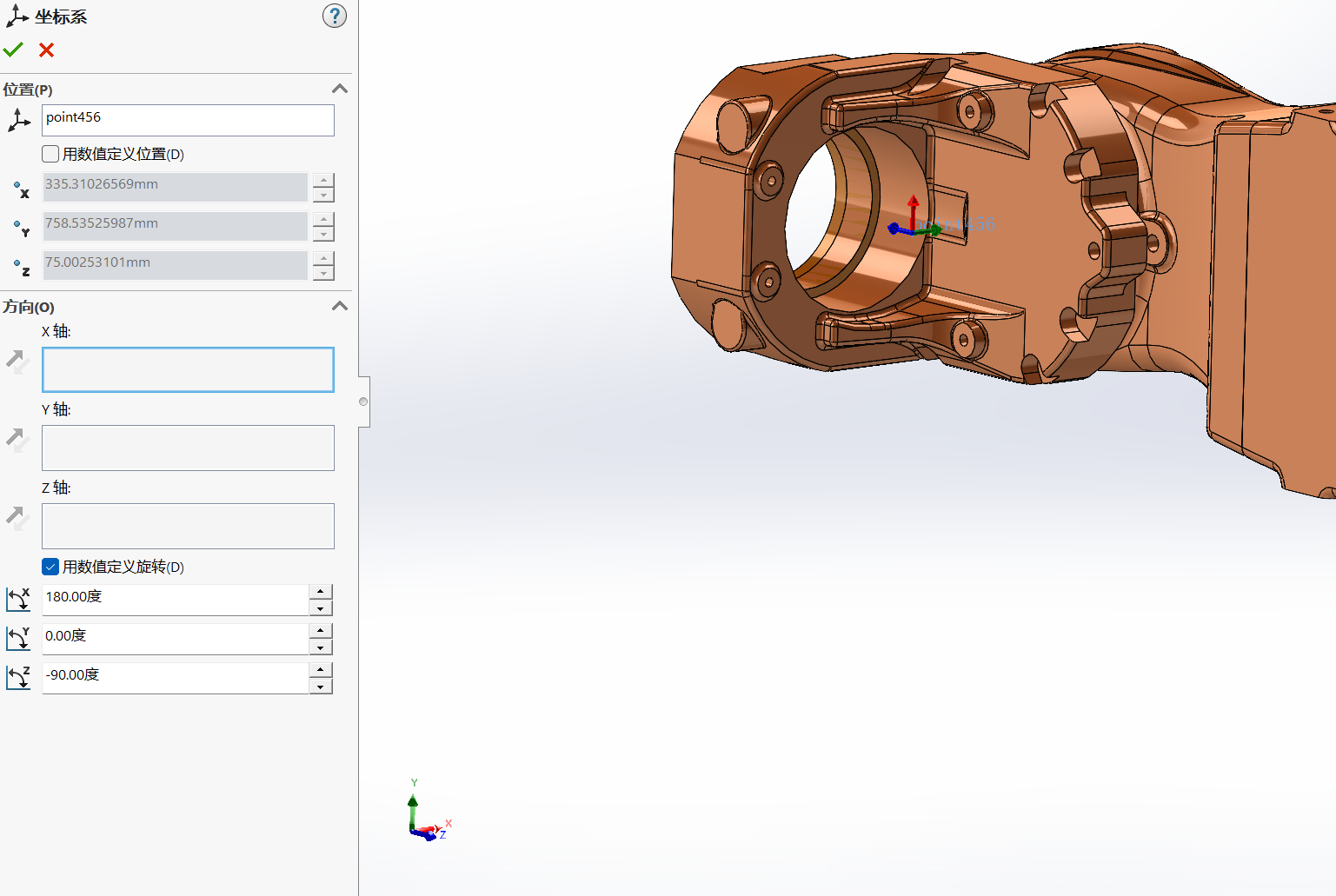
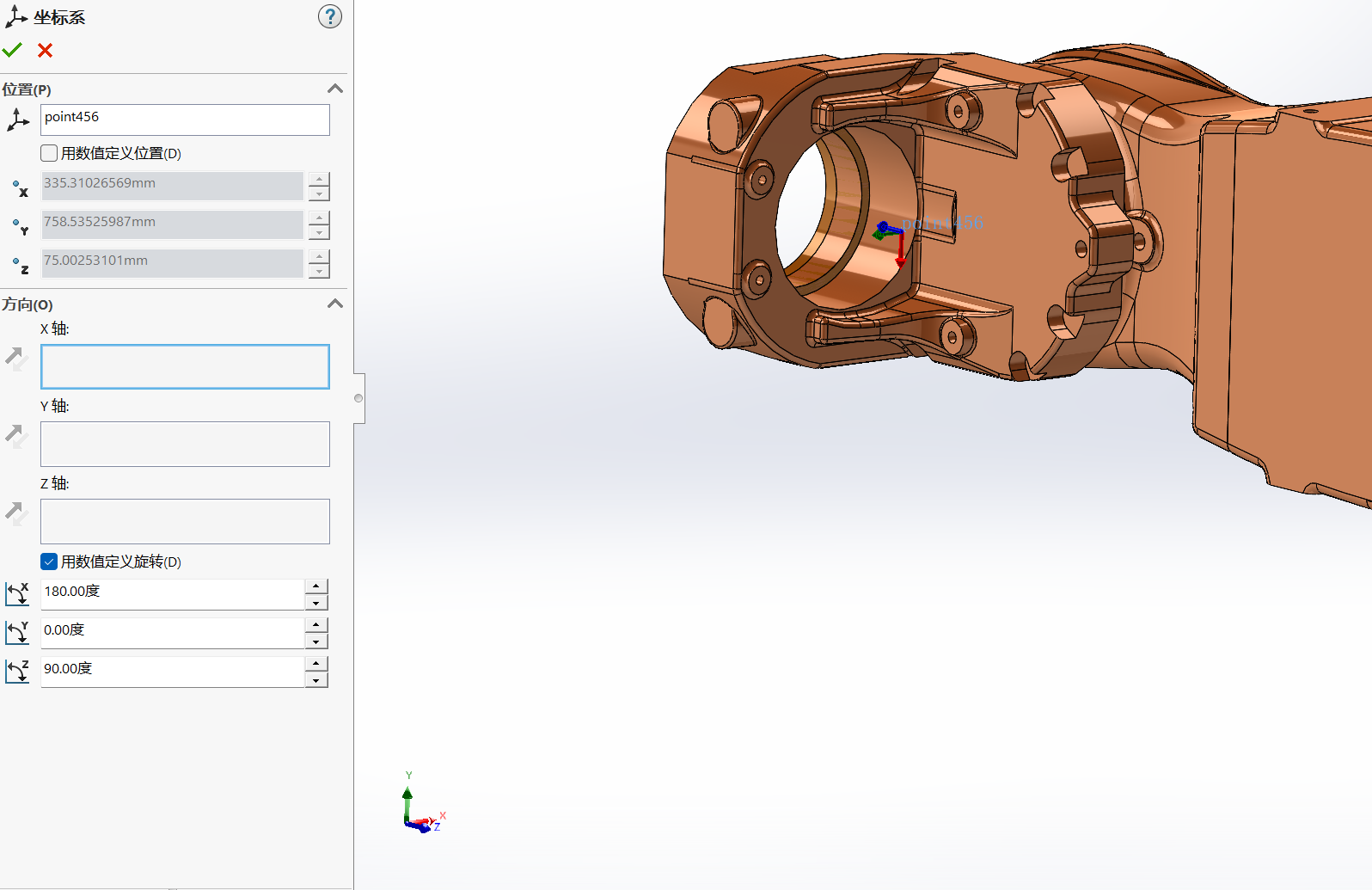
point3基准点
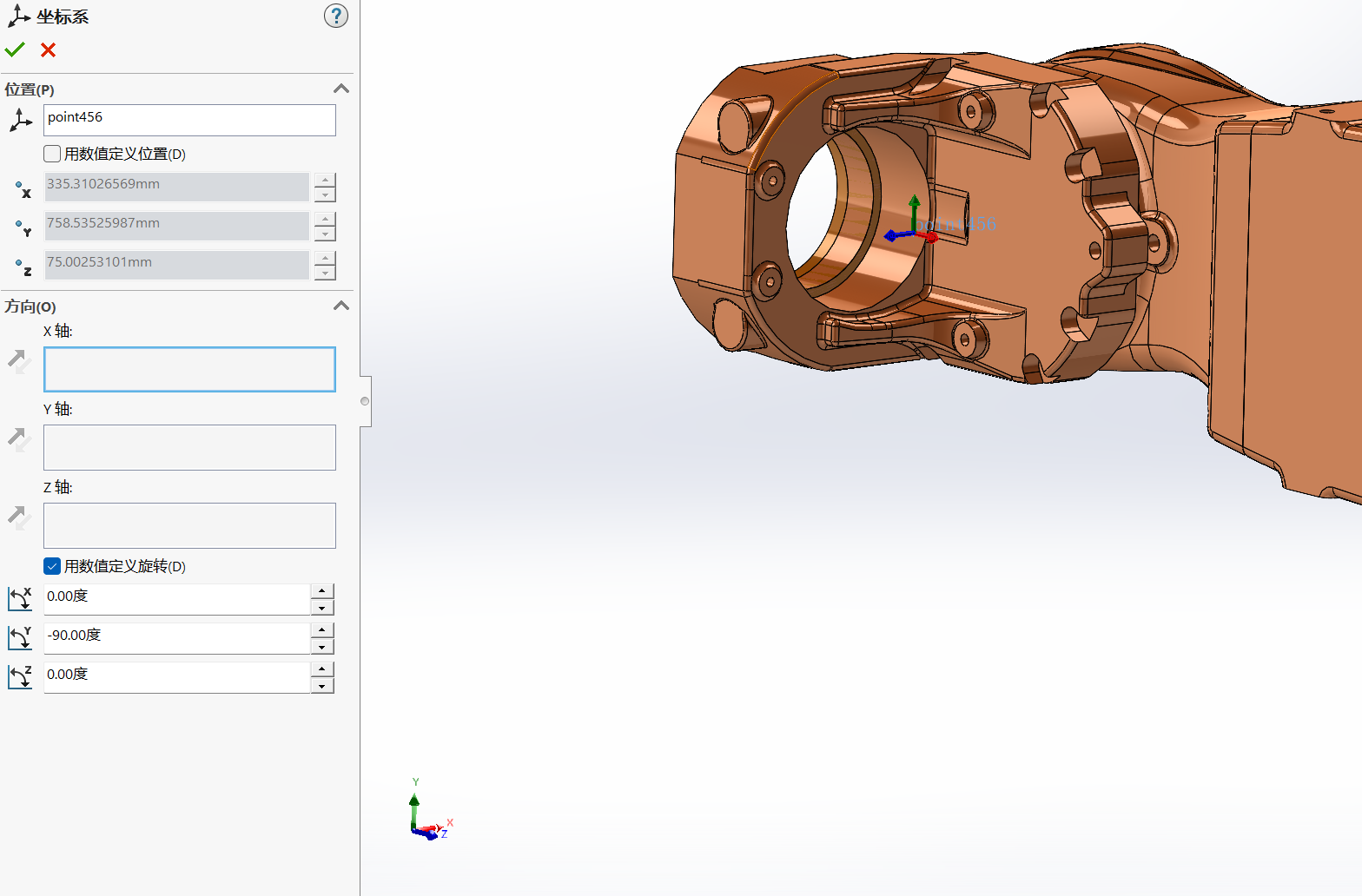
point456因
J4、J5和J6的基准点重合,故只创建一个共用基准点point456point456







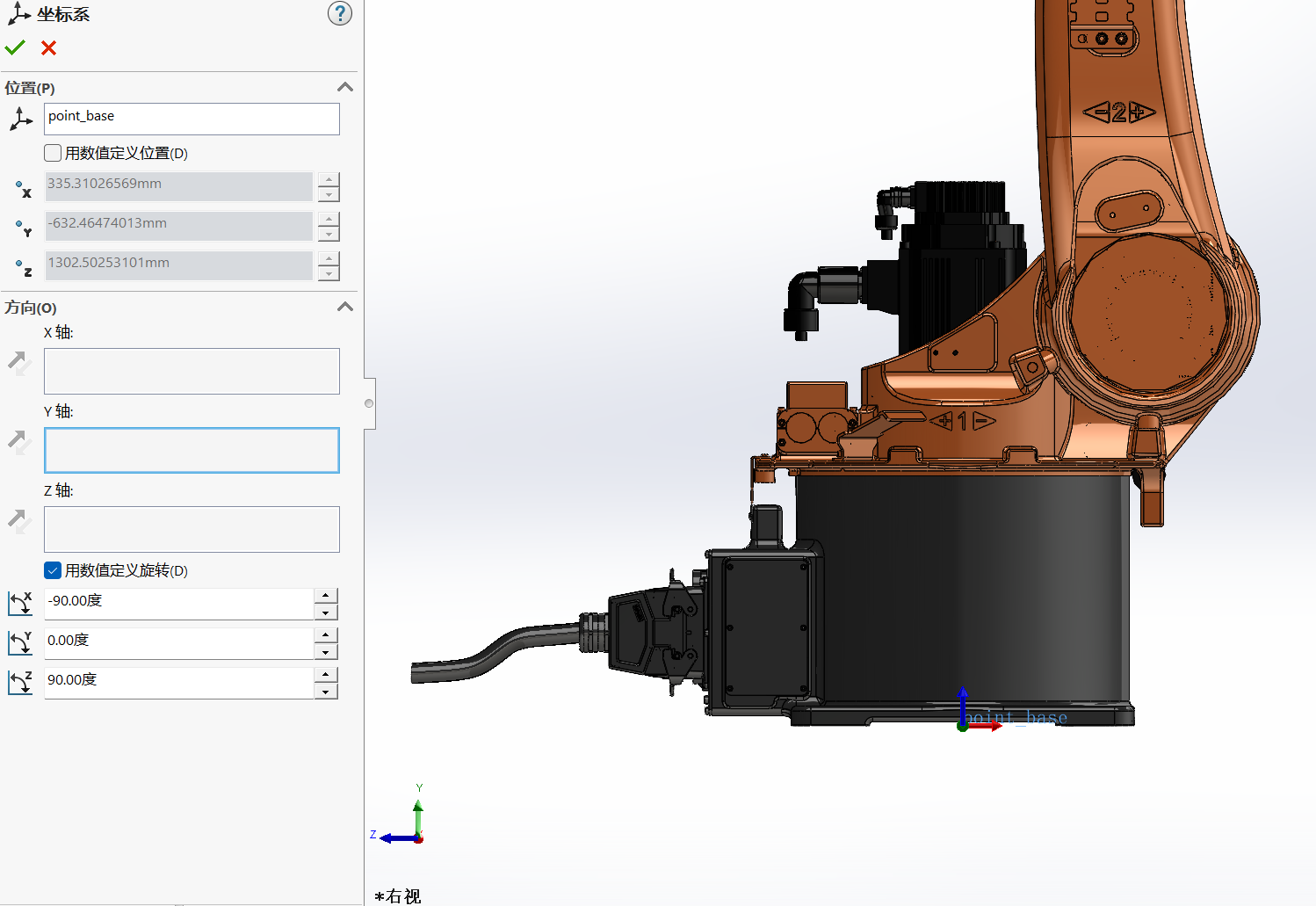
3. 配置参考坐标系
在配置参考坐标系时统一要求
+Z沿各关节基准轴矩阵
R=[x,y,z]表示与SolidWorks自动生成坐标系的旋转关系配置参考坐标系
参考坐标系
base_pointR=[-90, 0, 90]
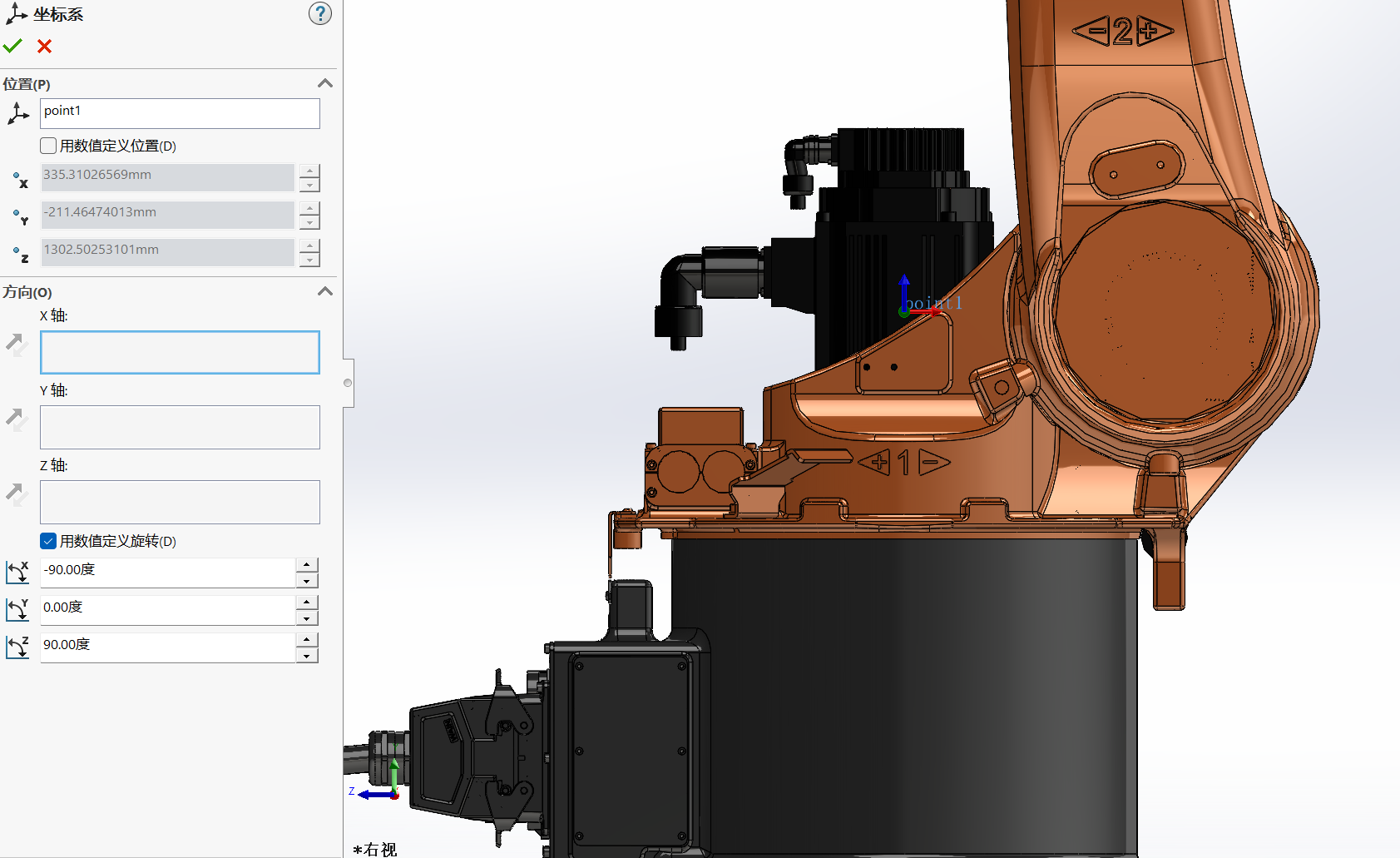
参考坐标系
frame1R=[-90, 0, 90]
参考坐标系
frame2R=[90, 90, 0]
参考坐标系
frame3R=[90, 90, 0]
参考坐标系
frame4R=[180, 0, -90]
参考坐标系
frame5R=[0, -90, 0]
参考坐标系
frame6R=[180, 0, 90]
4. Link和Joint配置
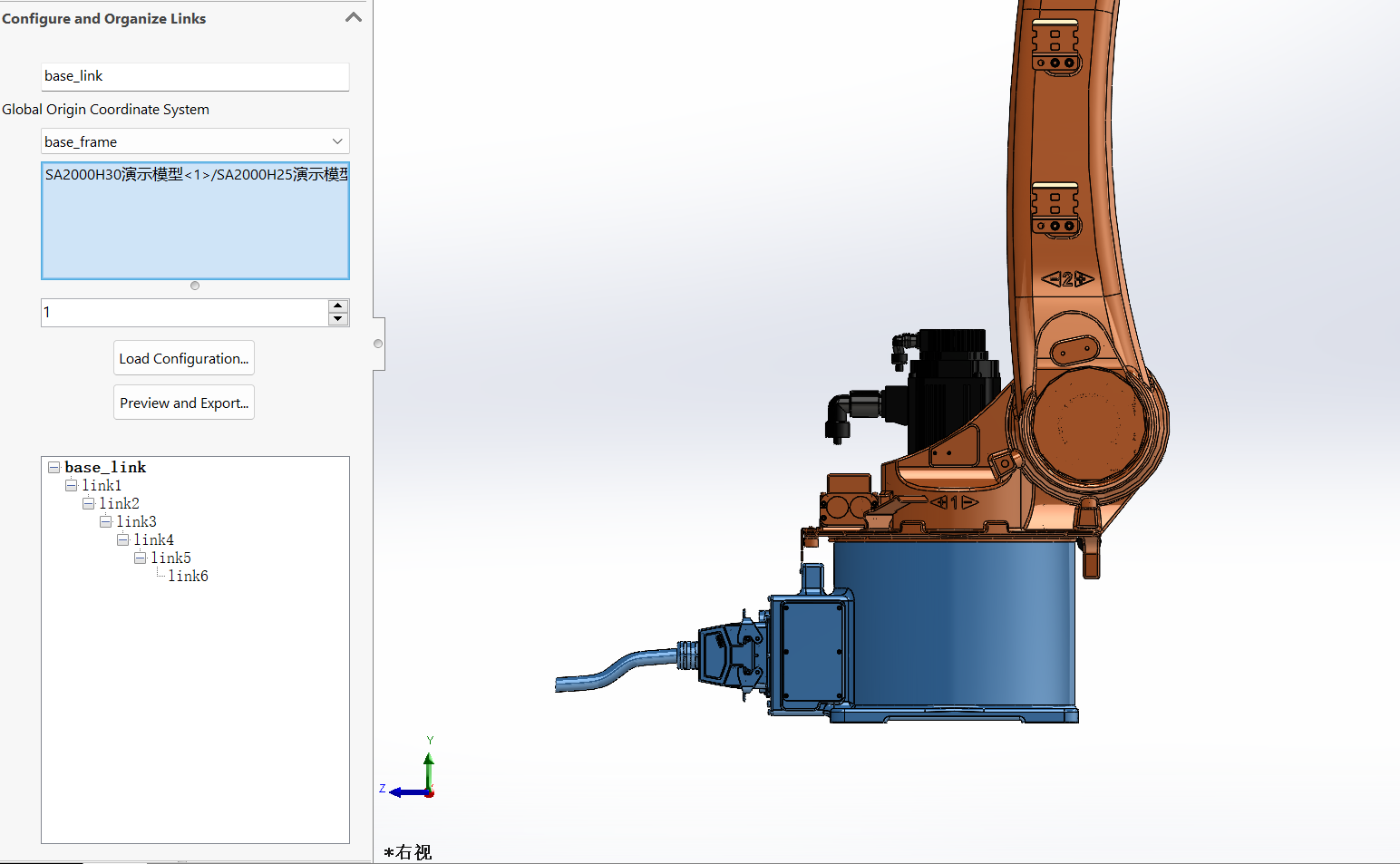
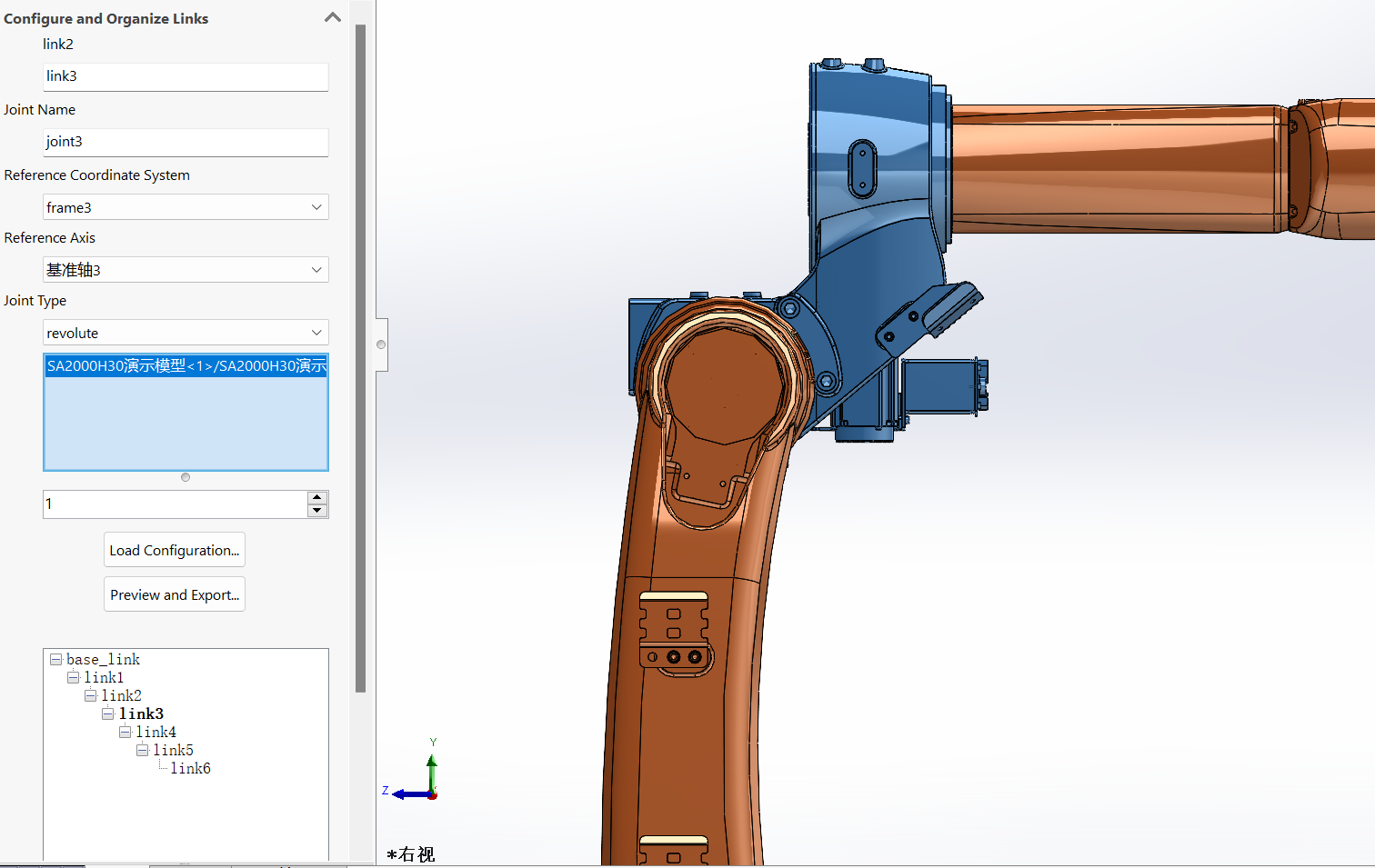
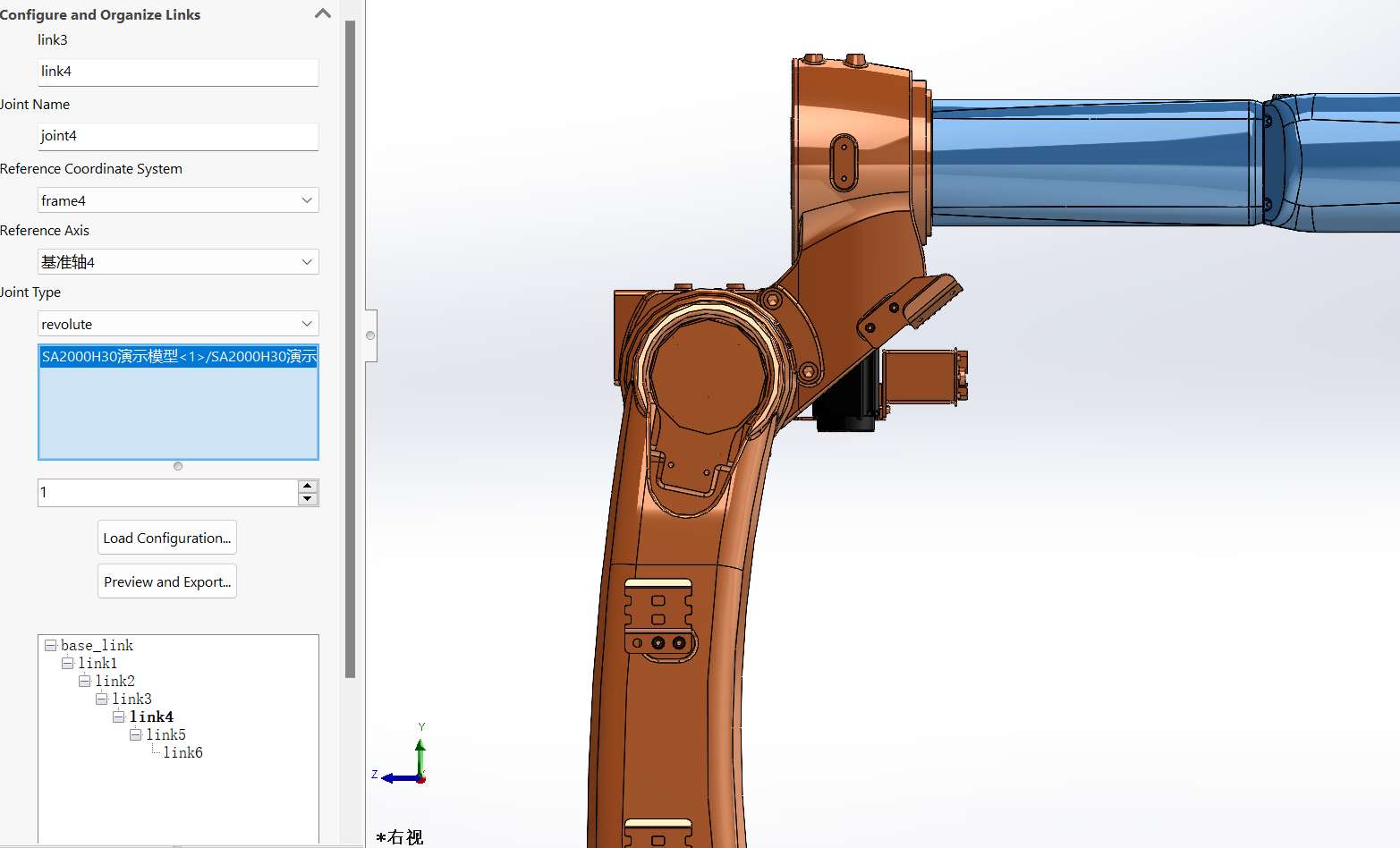
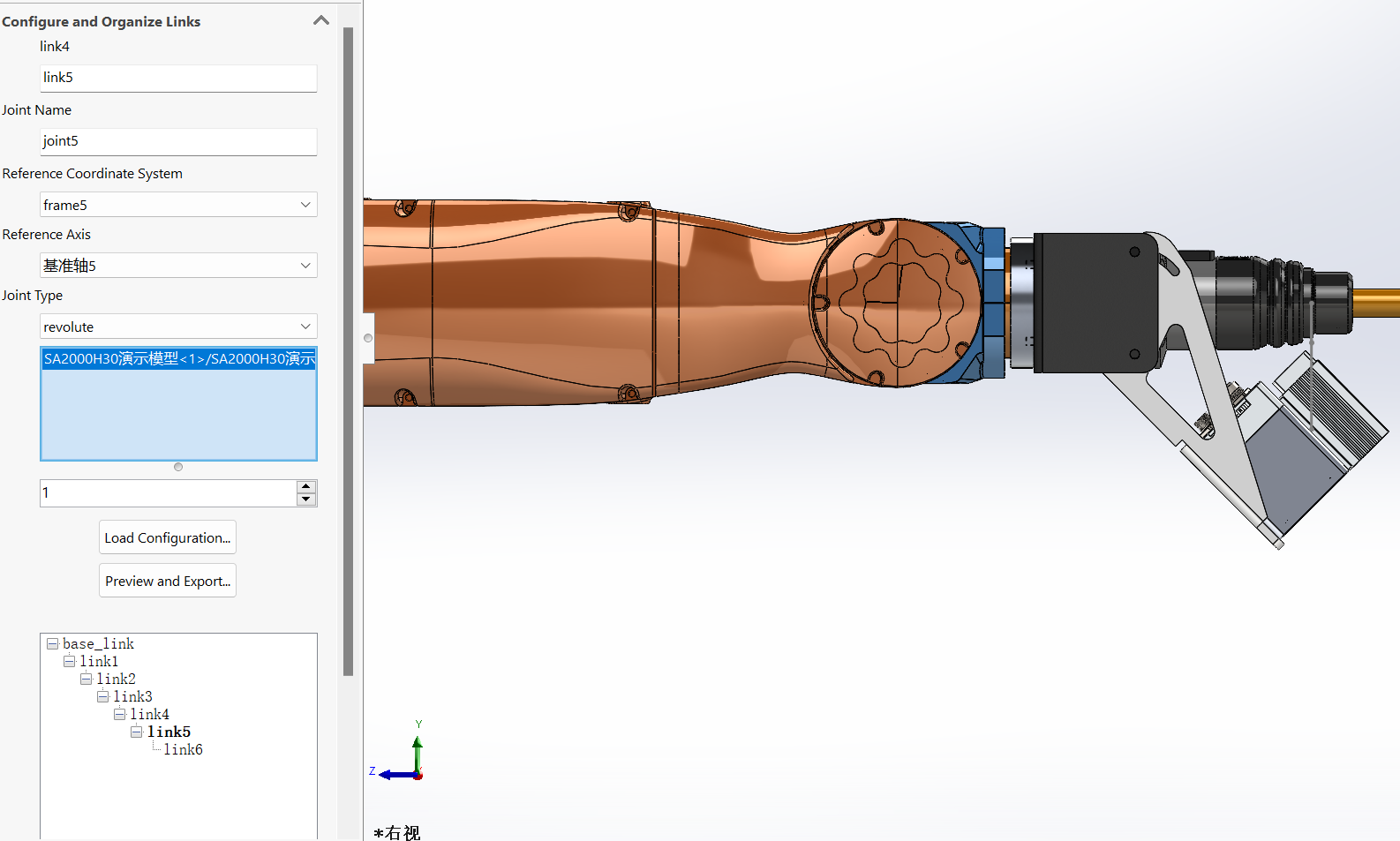
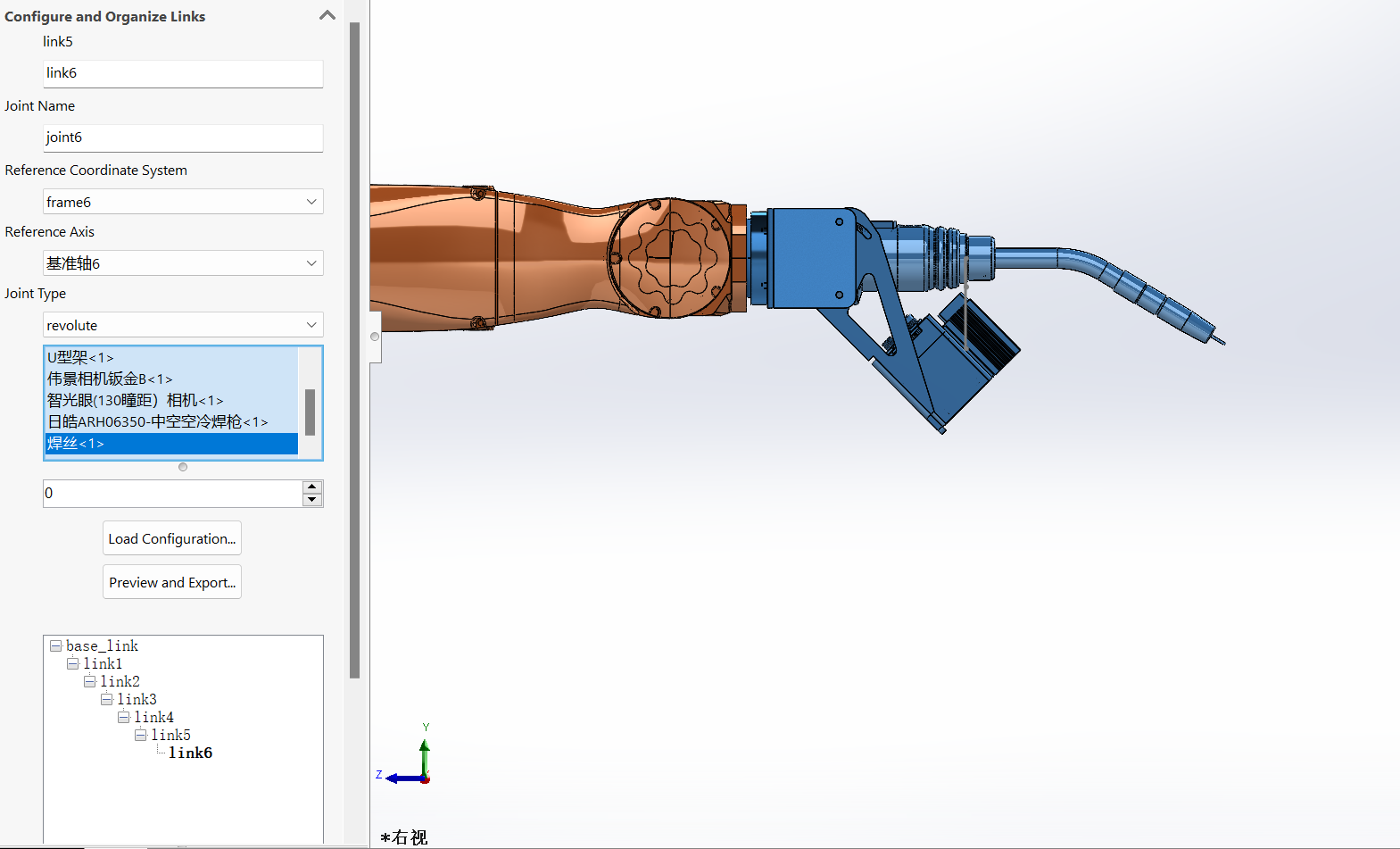
Link配置Link配置需要选择对应的坐标系、关节名称、参考旋转轴、关节类型和对应零件,以便生成正确的urdf文件用于路径规划和碰撞检测对于
base_link只需要配置旋转坐标系和对应零件即可,其他link则需要配置上述所有参数base_link配置
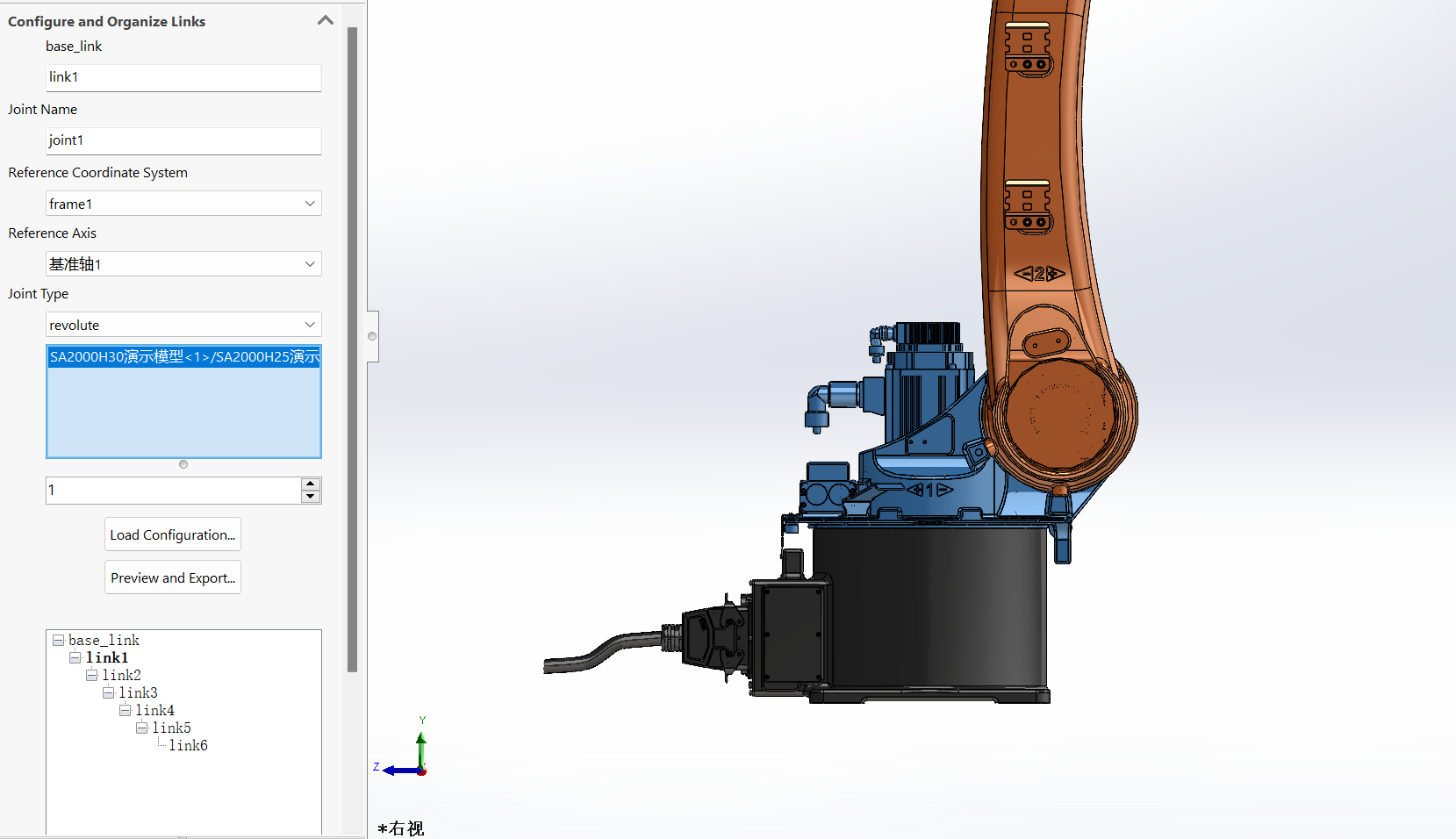
link1配置
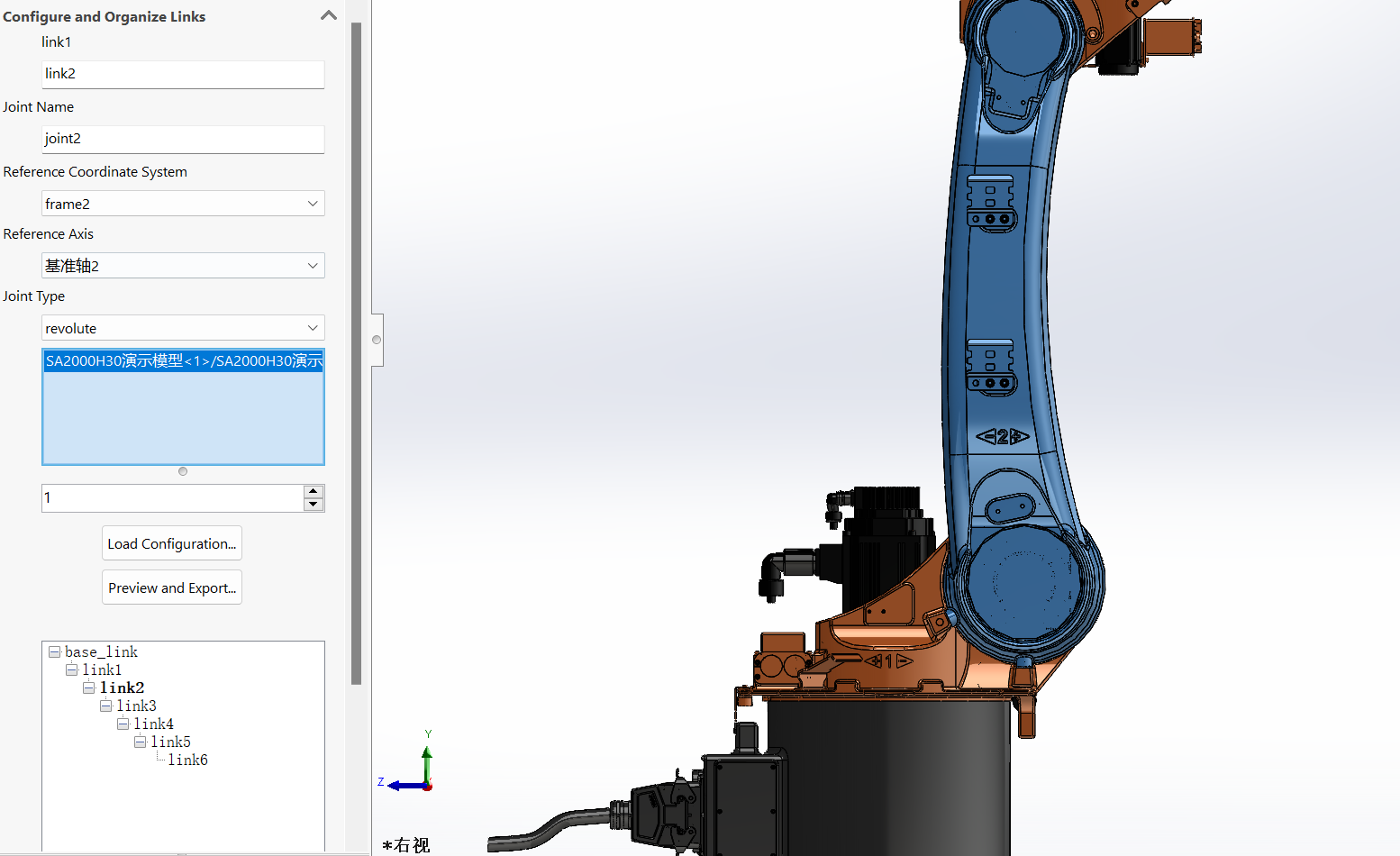
link2配置
link3配置
link4配置
link5配置
link6配置
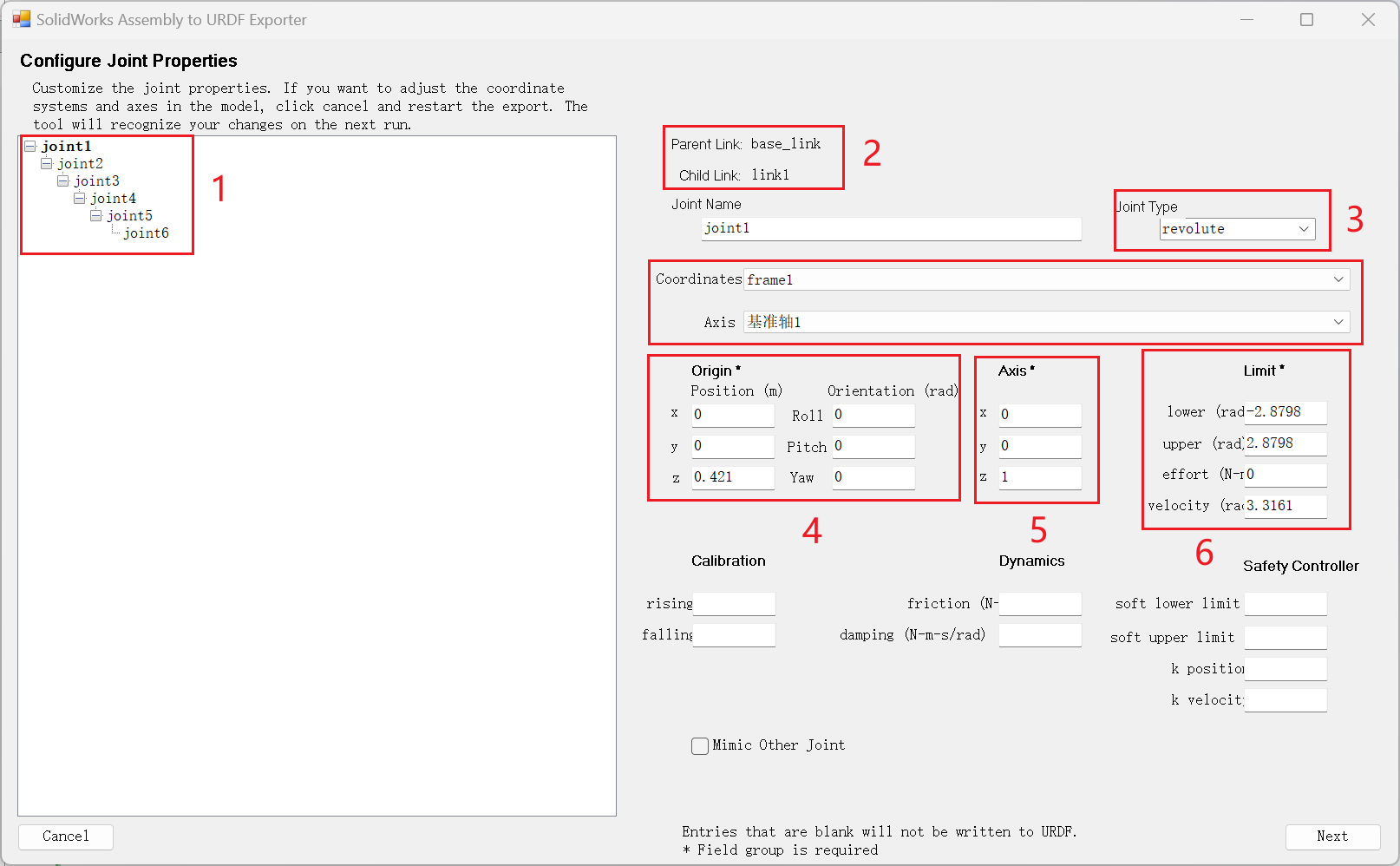
Joint配置
1:检查关节名称和顺序是否正确2:检查关节对应的Parent Link和Child Link是否正确3:检查关节类型Joint Type和参考坐标系、参考旋转轴是否正确- 一般情况下机械臂只用到两种关节类型
revolute类型:带有关节限制的旋转类型fixed类型:固定关节类型
4:检查坐标变换是否正确5:检查旋转方向是否正确(需要根据实际机器人旋转方向确定,可最后直接修改urdf文件)1:正方向-1:负方向
6:检查关节限制、力矩和速度设置是否正确 (可在机械臂说明书或是介绍单页中查看)
5. 修改urdf文件
在使用插件生成
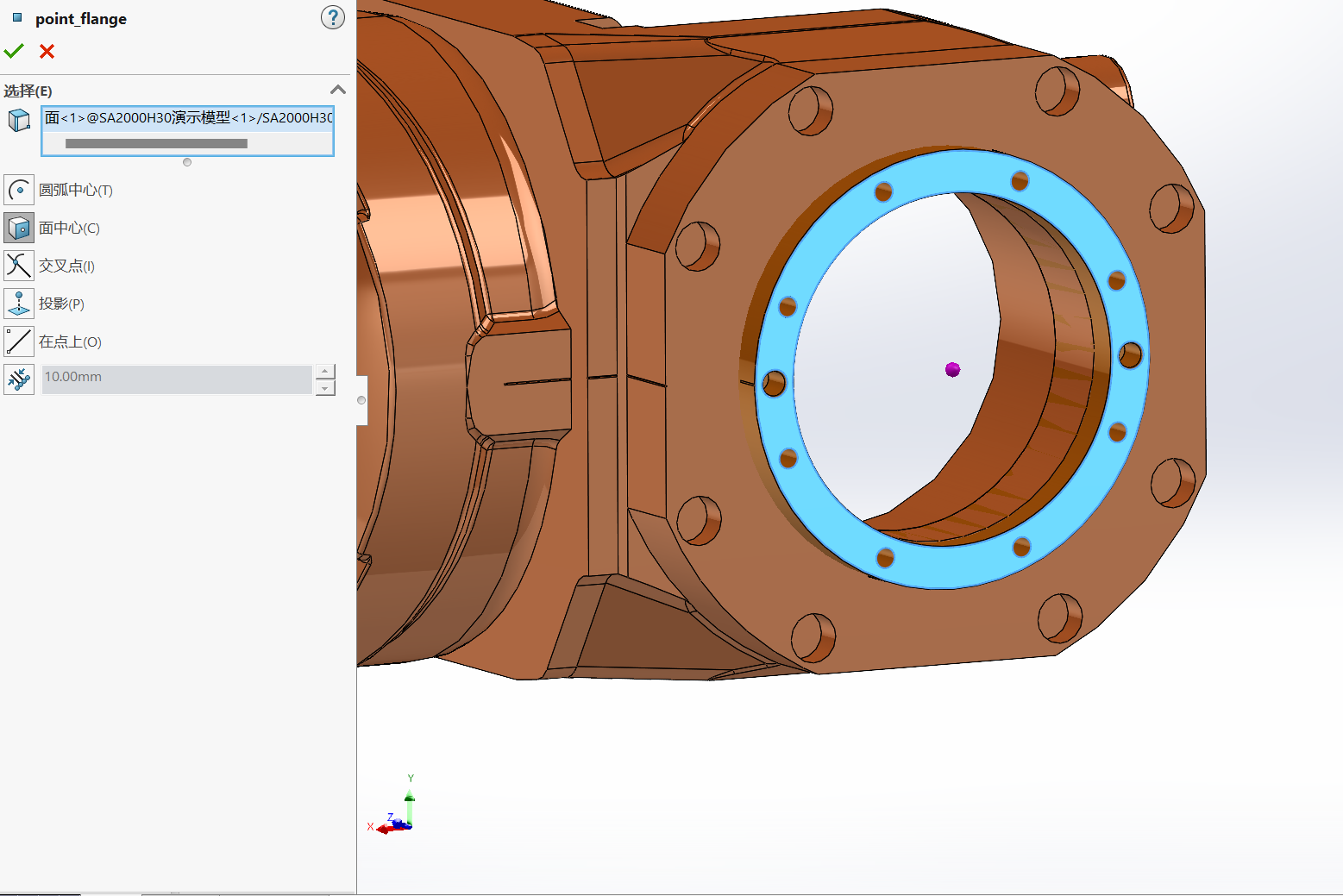
urdf文件时,只配置了关节J1-J6,接下来需要配置法兰盘和工具手配置法兰盘
创建
point_flange
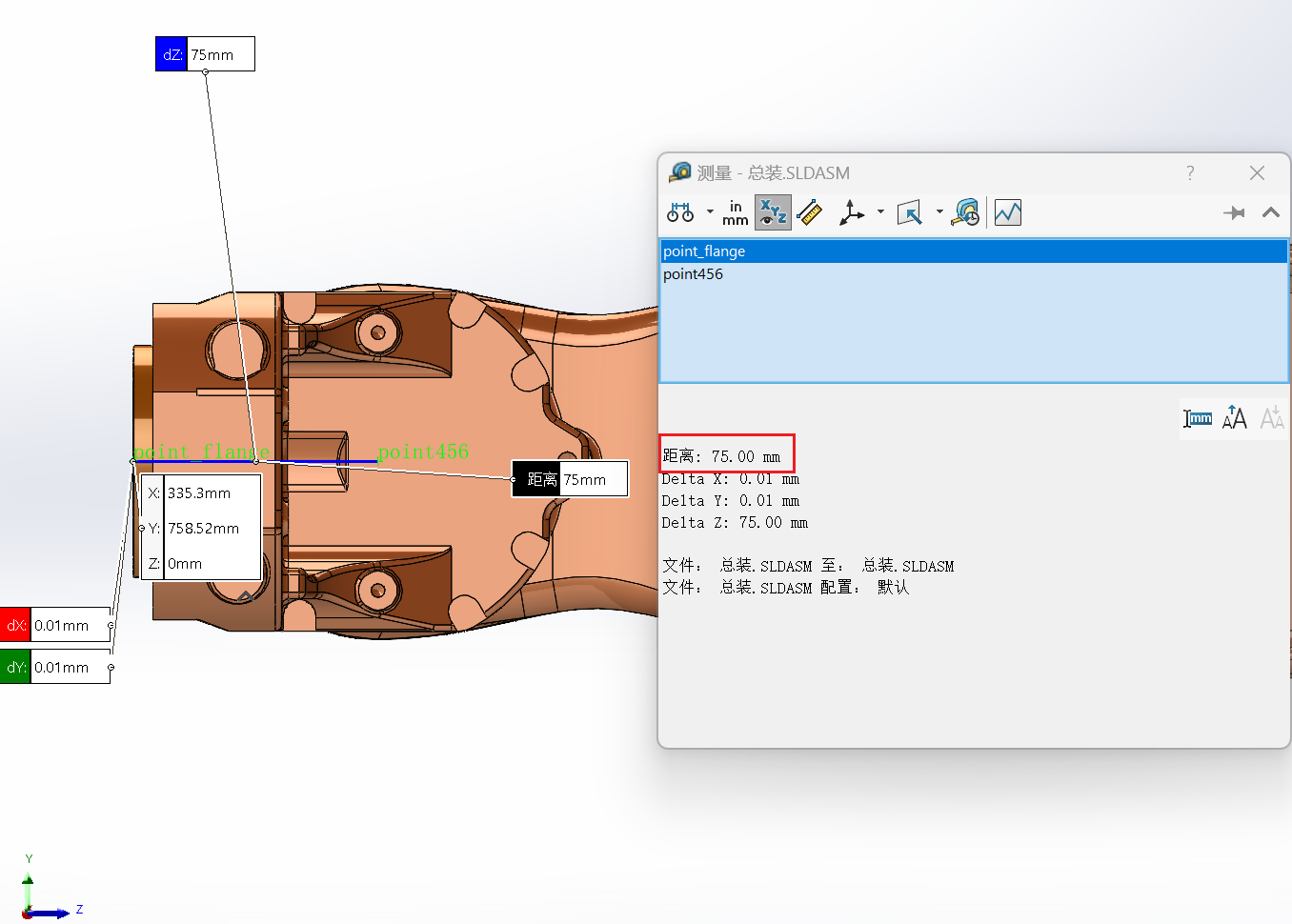
测量
point456到法兰盘参考点point_flange的距离
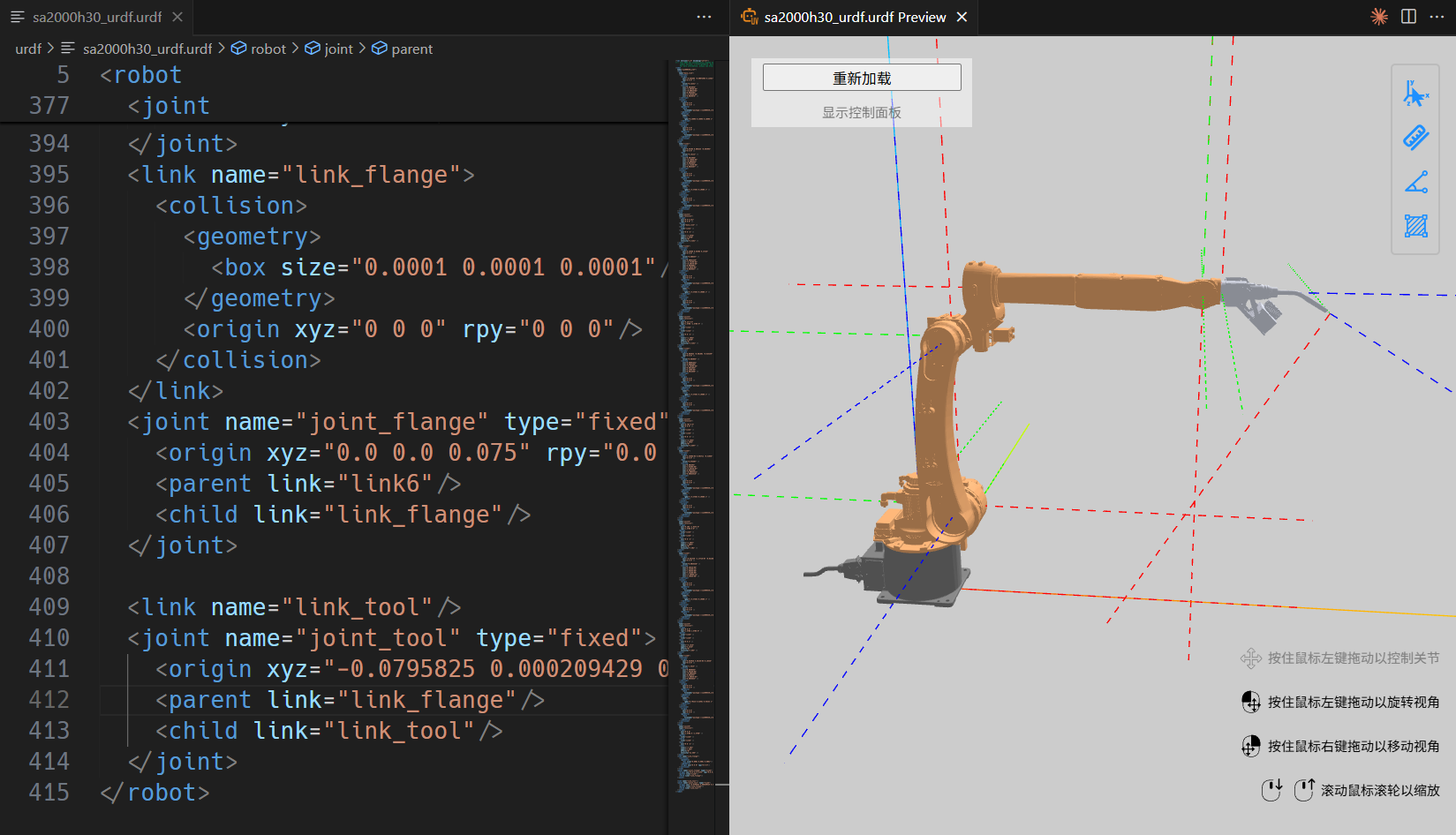
在
urdf文件中添加link_flange标签xml<link name="link_flange"> <collision> <geometry> <box size="0.0001 0.0001 0.0001"/> </geometry> <origin xyz="0 0 0" rpy="0 0 0"/> </collision> </link>接着在
urdf文件中添加joint_flange标签,将测得的距离转换为m后填入对应位置xml<joint name="joint_flange" type="fixed"> <origin xyz="0.0 0.0 <测得的距离>" rpy="0.0 0.0 3.1415926"/> <parent link="link6"/> <child link="link_flange"/> </joint>
配置工具手
首先需要获取
TCP标定数据在
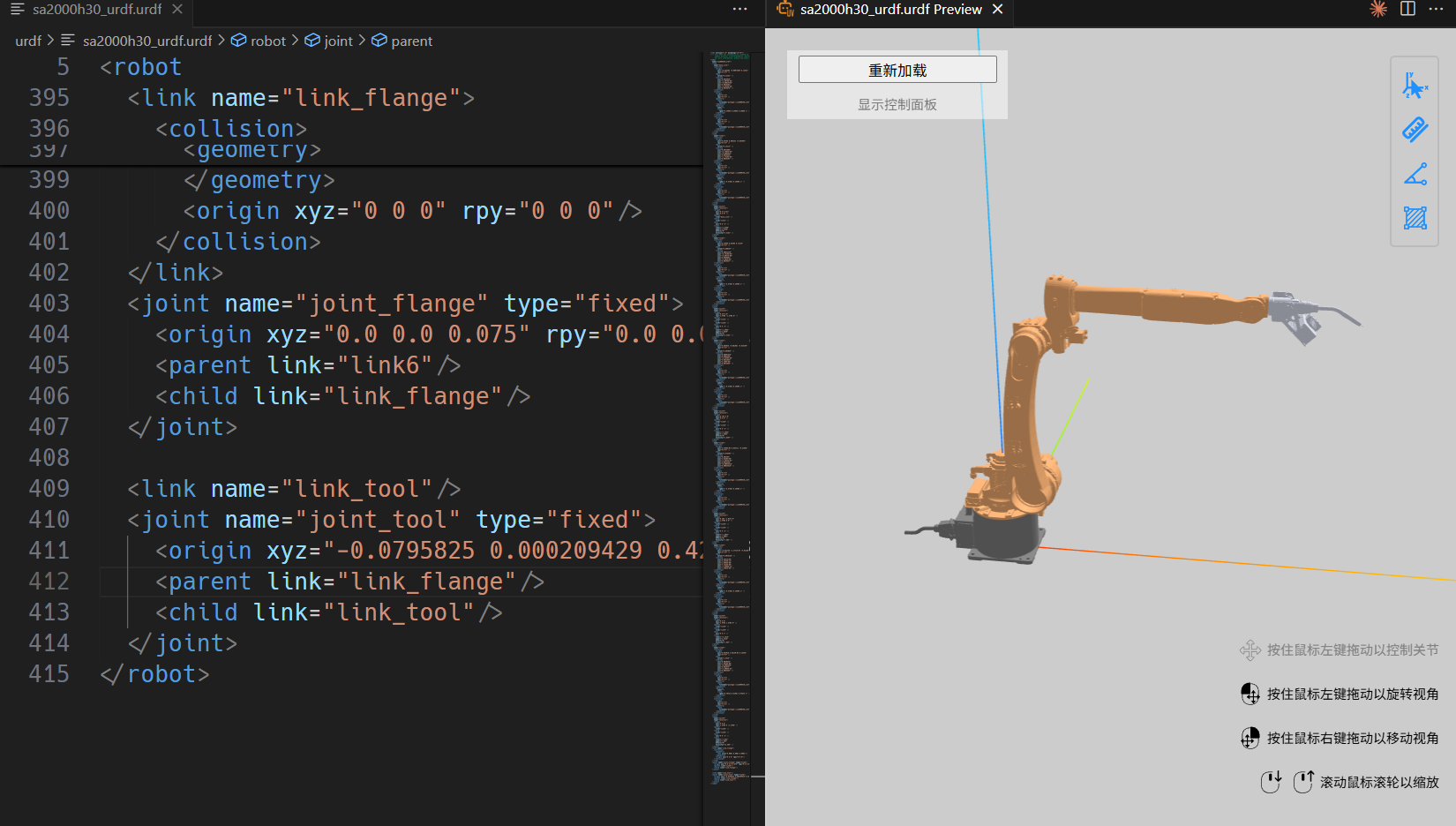
urdf文件中创建link_tool标签xml<link name="link_tool"/>接着在
urdf文件中创建joint_tool标签;注意将位置单位为m,角度单位为rad;此外旋转rpy不一定对应ABC,需要多次尝试或咨询机器人售后解决xml<joint name="joint_tool" type="fixed"> <origin xyz="-0.0795825 0.000209429 0.428486" rpy="0.0000283791 0.547625 3.14159"/> <parent link="link_flange"/> <child link="link_tool"/> </joint>
6. 检查生成的urdf文件和tf树是否正确
Windows下可借助本教程提供的工具来可视化检查urdf文件
检查
tf树是否正确
贡献者
 shine-tong
shine-tong