ROS2 常用工具
字数
1627 字
阅读时间
9 分钟
1. TF
使用
tf命令发布坐标关系bashros2 run tf2_ros static_transform_publisher --x 0.1 --y 0.0 --z 0.2 --roll 0.0 --pitch 0.0 --yaw 0.0 --frame-id base_link --child-frame-id base_laserstatic_transform_publisher:静态坐标变换(固定不变的坐标系才使用静态坐标变换,否则应使用动态坐标变换)x, y, z:空间坐标值R, P, Y:空间旋转值--frame-id:父link--child-frame-id:子link使用
tf命令计算link间的转换关系bashros2 run tf2_ros tf2_echo <link1> <link2>使用
view_frames查看坐标系的连接关系bashros2 run tf2_tools view_frames --- [INFO] [1737509566.070758685] [view_frames]: Listening to tf data for 5.0 seconds... [INFO] [1737509571.112308082] [view_frames]: Generating graph in frames.pdf file... [INFO] [1737509571.116881959] [view_frames]: Result:tf2_msgs.srv.FrameGraph_Response(frame_yaml="base_laser: \n parent: 'base_link'\n broadcaster: 'default_authority'\n rate: 10000.000\n most_recent_transform: 0.000000\n oldest_transform: 0.000000\n buffer_length: 0.000\nwall_link: \n parent: 'base_laser'\n broadcaster: 'default_authority'\n rate: 10000.000\n most_recent_transform: 0.000000\n oldest_transform: 0.000000\n buffer_length: 0.000\n")该命令会生成一个
.gv文件和一个pdf文件使用
Python发布静态TFpythonimport math import rclpy from rclpy.node import Node from geometry_msgs.msg import TransformStamped from tf2_ros import StaticTransformBroadcaster from tf_transformations import quaternion_from_euler class StaticTFPublisher(Node): def __init__(self, node_name): super().__init__(node_name) self.static_broadcaster = StaticTransformBroadcaster(self) # 该类需要传入一个node作为参数 self.pub_static_tf() def pub_static_tf(self): # 实例化TransformStamped类 transform = TransformStamped() transform.header.stamp = self.get_clock().now().to_msg() transform.header.frame_id = "base_link" # 父link transform.child_frame_id = "camera_link" # 子link # xyz平移变换 transform.transform.translation.x = 0.5 transform.transform.translation.y = 0.3 transform.transform.translation.z = 0.6 # xyzw四元数旋转变换 q = quaternion_from_euler(math.radians(180), 0, 0) transform.transform.rotation.x = q[0] transform.transform.rotation.y = q[1] transform.transform.rotation.z = q[2] transform.transform.rotation.w = q[3] self.static_broadcaster.sendTransform(transform) self.get_logger().info(f'发布TF: {transform}') def main(): rclpy.init() node = StaticTFPublisher('static_tf_pub') rclpy.spin(node) rclpy.shutdown()StaticTransformBroadcaster(self):self参数表示将自身节点对象作为参数静态坐标变换只会发布一次,ROS2会保留其数据,订阅者可直接订阅到所需的静态坐标变换数据
使用
Python发布动态TFpythonimport math import rclpy from rclpy.node import Node from geometry_msgs.msg import TransformStamped from tf2_ros import TransformBroadcaster from tf_transformations import quaternion_from_euler class DynamicTFPublisher(Node): def __init__(self, node_name): super().__init__(node_name) self.dynamic_tf_broadcaster = TransformBroadcaster(self) # 创建定时器定时发送tf数据 self.timer = self.create_timer(0.01, self.tf_pub_callback) def tf_pub_callback(self): transform = TransformStamped() transform.header.stamp = self.get_clock().now().to_msg() transform.header.frame_id = "camera_link" transform.child_frame_id = "bottle_link" transform.transform.translation.x = 0.2 transform.transform.translation.y = 0.3 transform.transform.translation.z = 0.5 q = quaternion_from_euler(0, 0, 0) transform.transform.rotation.x = q[0] transform.transform.rotation.y = q[1] transform.transform.rotation.z = q[2] transform.transform.rotation.w = q[3] self.dynamic_tf_broadcaster.sendTransform(transform) self.get_logger().info(f'发布TF: {transform}') def main(): rclpy.init() node = DynamicTFPublisher('tf_pub') rclpy.spin(node) rclpy.shutdown()动态坐标变换需要持续的发布才有效
使用
Python查看TF关系pythonimport rclpy from rclpy.node import Node from tf2_ros import TransformListener, Buffer from tf_transformations import euler_from_quaternion class TFLisener(Node): def __init__(self, node_name): super().__init__(node_name) # 缓冲类,用来存放TF数据 self.buffer = Buffer() self.tf_lisener = TransformListener(self.buffer, self) self.timer = self.create_timer(1.0, self.get_transform_callback) def get_transform_callback(self): try: result = self.buffer.lookup_transform( 'base_link', 'bottle_link', rclpy.time.Time(seconds=0.0), rclpy.time.Duration(seconds=1.0) ) transform = result.transform rotation_euler = euler_from_quaternion([ transform.rotation.x, transform.rotation.y, transform.rotation.z, transform.rotation.w, ]) self.get_logger().info(f'平移: {transform.translation}, 旋转四元数: {transform.rotation}, 旋转欧拉角: {rotation_euler}') except Exception as e: self.get_logger().warn(f'获取坐标变换失败,原因: {str(e)}') def main(): rclpy.init() node = TFLisener('tf_lisener') rclpy.spin(node) rclpy.shutdown()
2. URDF模型
URDF文件标签xml<?xml version="1.0"?> <robot name="first_robot"> <!-- 机器人身体部分 --> <link name="base_link"> <!-- 部件显示描述 --> <visual> <!-- 偏移和旋转是基于自身几何中心 --> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <!-- 定义部件形状 --> <geometry> <cylinder radius="0.12" length="0.1"/> </geometry> <!-- 定义部件的颜色和材质 --> <material name="white"> <color rgba="1.0 1.0 1.0 0.5"/> </material> </visual> </link> <!-- 机器人IMU部件 --> <link name="imu_link"> <!-- 部件显示描述 --> <visual> <!-- 偏移和旋转是基于自身几何中心 --> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <!-- 定义部件形状 --> <geometry> <box size="0.02 0.02 0.02"/> </geometry> <!-- 定义部件的颜色和材质 --> <material name="white"> <color rgba="0.0 0.0 0.0 0.5"/> </material> </visual> </link> <!-- 定义连接机器人身体和IMU的关节 --> <joint name="imu_joint" type="fixed"> <parent link="base_link"/> <child link="imu_link"/> <origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/> </joint> </robot>可以使用
urdf_to_graghviz命令查看转换关系bashurdf_to_graghviz robot_urdf.urdf robot_urdf ------------------------- Created file robot_urdf.gv Created file robot_urdf.pdf
3. 使用Rviz显示URDF模型
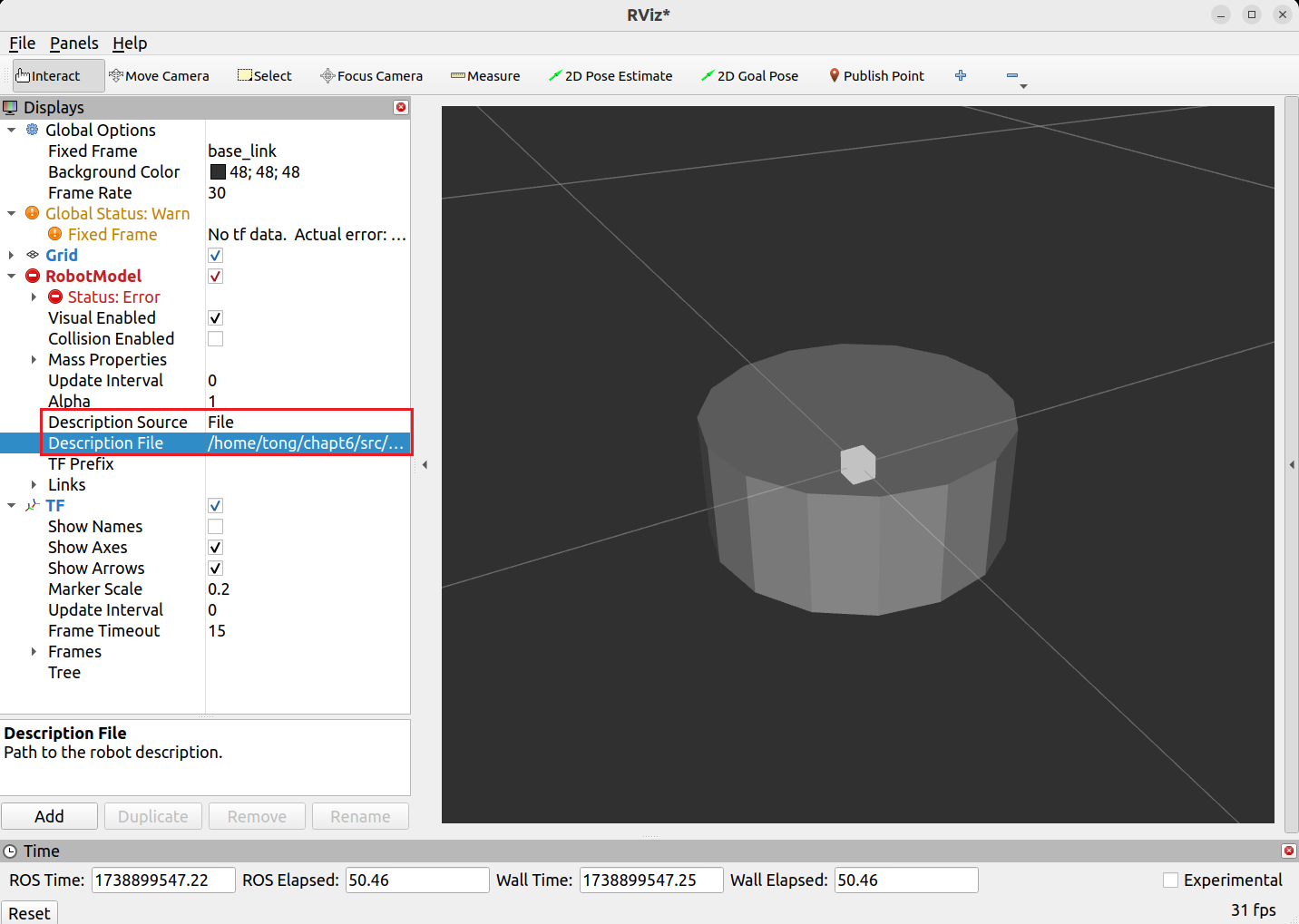
直接使用
rviz查看urdf模型bashrviz2
Description Source:选择FileDescription File:选择urdf文件所在路径Fixed Frame:选择base_link
编写
launch文件来查看urdf模型安装依赖
bashsudo apt install ros-$ROS_DISTRO-robot-state-publisher sudo apt install ros-$ROS_DISTRO-joint-state-publisher编写
launch文件pythonimport launch import launch_ros from ament_index_python.packages import get_package_share_directory import launch_ros.parameter_descriptions def generate_launch_description(): # 获取默认路径 urdf_tutorial_path = get_package_share_directory('robot_description') default_model_path = urdf_tutorial_path + '/urdf/robot_urdf.urdf' default_rviz_config_path = urdf_tutorial_path + '/config/rviz/display_model.rviz' # 为launch声明参数 action_declare_arg_model_path = launch.actions.DeclareLaunchArgument( name='model', default_value=default_model_path, description='URDF的绝对路径' ) # 获取文件内容生成新的参数 robot_description = launch_ros.parameter_descriptions.ParameterValue( launch.substitutions.Command( ['cat ', launch.substitutions.LaunchConfiguration('model')] ), value_type=str ) # 状态发布节点 robot_state_publisher_node = launch_ros.actions.Node( package='robot_state_publisher', executable='robot_state_publisher', parameters=[{'robot_description': robot_description}] ) # 关节状态发布节点 joint_state_publisher_node = launch_ros.actions.Node( package='joint_state_publisher', executable='joint_state_publisher', ) # Rviz节点 rviz_node = launch_ros.actions.Node( package='rviz2', executable='rviz2', arguments=['d', default_rviz_config_path] ) return launch.LaunchDescription([ action_declare_arg_model_path, joint_state_publisher_node, robot_state_publisher_node, rviz_node ])在
CMakeLists.txt中将urdf和launch文件复制到install目录下pythoninstall(DIRECTORY launch urdf DESTINATION share/${PROJECT_NAME} )可将
Rviz配置保存到功能包的config/rviz目录下,方便launch文件读取python... def generate_launch_description(): ... default_rviz_config_path = urdf_tutorial_path + '/config/rviz/display_model.rviz' ... # Rviz节点 rviz_node = launch_ros.actions.Node( package='rviz2', executable='rviz2', arguments=['-d', default_rviz_config_path] ) ...修改
CMakeLists,将config目录下的内容复制到install目录下,防止运行时找不到配置文件
4. xacro
使用
xacro简化urdf模型安装
xacroxmlsudo apt install ros-$ROS_DISTRO-xacroxacro宏定义的结构xml<?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="first_robot"> <!-- 声明base_link模块 --> <xacro:macro name='base_link' params="radius length"> <link name="base_link"> <visual> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <geometry> <cylinder radius="${radius}" length="${length}"/> </geometry> <material name="white"> <color rgba="1.0 1.0 1.0 0.5"/> </material> </visual> </link> </xacro:macro> <!-- 声明imu模块 --> <xacro:macro name='imu_link' params="imu_name xyz"> <link name="${imu_name}_link"> <visual> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <geometry> <box size="0.02 0.02 0.02"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5"/> </material> </visual> </link> <joint name="${imu_name}_joint" type="fixed"> <parent link="base_link"/> <child link="${imu_name}_link"/> <origin xyz="${xyz}"/> </joint> </xacro:macro> <!-- 传递参数调用base_link模块 --> <xacro:base_link radius='0.1' length='0.12'/> <!-- 传递参数调用imu模块 --> <xacro:imu_link imu_name='imu_up' xyz='0 0 0.02'/> <xacro:imu_link imu_name='imu_down' xyz='0 0 -0.02'/> </robot>使用命令将
xacro转换为urdfxmlxacro first_robot.urdf.xacro -------- <?xml version="1.0" ?> <!-- =================================================================================== --> <!-- | This document was autogenerated by xacro from robot_urdf.xacro | --> <!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED | --> <!-- =================================================================================== --> <robot name="first_robot"> <link name="base_link"> <visual> <origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/> <geometry> <cylinder length="0.12" radius="0.1"/> </geometry> <material name="white"> <color rgba="1.0 1.0 1.0 0.5"/> </material> </visual> </link> <link name="imu_up_link"> <visual> <origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/> <geometry> <box size="0.02 0.02 0.02"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5"/> </material> </visual> </link> <joint name="imu_up_joint" type="fixed"> <parent link="base_link"/> <child link="imu_up_link"/> <origin xyz="0 0 0.02"/> </joint> <link name="imu_down_link"> <visual> <origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/> <geometry> <box size="0.02 0.02 0.02"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5"/> </material> </visual> </link> <joint name="imu_down_joint" type="fixed"> <parent link="base_link"/> <child link="imu_down_link"/> <origin xyz="0 0 -0.02"/> </joint> </robot>
使用
launch命令在rviz中显示模型pythondef generate_launch_description(): ... # 获取文件内容生成新的参数,将cat替换为xacro即可 robot_description = launch_ros.parameter_descriptions.ParameterValue( launch.substitutions.Command( ['xacro ', launch.substitutions.LaunchConfiguration('model')] ), value_type=str ) ...
贡献者
 shine-tong
shine-tong