ROS2 建图和导航
1. SLAM建图
安装
SLAM建图相关工具bashsudo apt install ros-humble-slam-toolbox以仿真时间启动
slam-toolboxbashros2 launch slam_toolbox online_async_launch.py use_sim_time:=Trueslam_toolbox的输入有两个,第一个是订阅来自雷达的/scan话题,用来获取雷达数据;另一个是获取里程计坐标系/odom到机器人坐标系/base_footprint的坐标转换。这些数据都含有时间戳,因此使用Gazebo的仿真时间来防止因时间戳造成的数据不合法使用
rviz查看地图信息- 使用命令
rviz2打开rviz - 修改
Fixed Frame为map - 执行
Add → By topic,添加/map和/camera_sensor/image_raw/image话题
- 使用命令
启动键盘控制节点,控制机器人完成建图
bashros2 run teleop_twist_keyboard teleop_twist_keyboard因雷达扫描速率不够,当在控制机器人进行建图的时候,速度和加速度应控制在一个合适的范围内(尽量速度慢一些),防止因速度过大造成较大的测量误差。
保存地图,用于后续导航服务
安装地图服务
bashsudo apt install ros-humble-nav2-map-server保存地图
bashros2 run nav2_map_server map_server_cli -f <map_name> ----- room.pgm room.yamlpgm格式是一种图片格式,使用常用图片查看器可以查看,也可以使用Photoshop等软件修改room.yaml的配置信息yamlimage: room.pgm mode: trinary resolution: 0.05 origin: [-10.4, -6.53, 0] negate: 0 occupied_thresh: 0.65 free_thresh: 0.25image:地图名称mode:地图类型,参数trinary表示地图中的每个像素点有三种可能的状态:障碍物的占据(occupied)状态用==黑色==表示;无障碍的自由(free)状态用==白色==表示;未探索的未知(unknown)状态用==灰色==表示resolution:地图分辨率,0.05表示每个像素对应的物理尺寸为0.05morigin:地图坐标系的原点,单位为m,默认设置在启动建图的位置negate:是否对地图进行取反操作,0表示不取反occupied_thresh:设置障碍物的占据状态,设置为0.65表示大于或等于0.65就认为该像素对应的位置为占据状态free_thresh:设置障碍物的自由状态,设置0.25表示小于或等于0.25就认为该像素对应的位置为自由状态
2. Navigation2 导航
安装
Navigation2相关工具bashsudo apt install ros-humble-navigation2 sudo apt install ros-humble-nav2-bringup配置
Navigation2参数bashcp /opt/ros/humble/share/nav2_bringup/params/nav2_params.yaml src/fishrobot_navigition2/confignav2_bringup提供了一个默认参数文件,我们只需在此基础上进行修改即可修改相关参数
yamllocal_costmap: local_costmap: ros_parameters: ... robot_radius: 0.12 global_costmap: global_costmap: ros_parameters: ... robot_radius: 0.12- 参数中带有
topic的基本为关于话题的配置,例如scan_topic表示雷达数据话题名称,odom_topic表示里程计话题名称。 - 参数中带有
frame的基本为关于坐标系的配置,例如odom_frame_id表示里程计坐标系的名称,robot_base_frame表示机器人基础坐标系名称 - 在配置机器人信息时,最好将相关话题名称和坐标系名称与
navigation2配置名称保持一致 - 此外,还需要考虑机器人的半径
robot_radius,需要在全局代价地图global_costmap和局部代价地图local_costmap的参数中进行配置,使其与真实机器人半径保持一致
- 参数中带有
编写Launch文件并启动导航
编写
launch启动文件pythonimport os import launch import launch_ros from ament_index_python.packages import get_package_share_directory from launch.launch_description_sources import PythonLaunchDescriptionSource def generate_launch_description(): # 获取并拼接默认路径 fishrobot_navigatiob2_dir = get_package_share_directory('fishrobot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') rviz_config_dir = os.path.join( nav2_bringup_dir, 'rviz', 'nav2_default_view.rviz' ) # 创建launch配置 use_sim_time = launch.substitutions.LaunchConfiguration( 'use_sim_time', default=True ) map_yaml_path = launch.substitutions.LaunchConfiguration( 'map', default=os.path.join(fishrobot_navigatiob2_dir, 'maps', 'room.yaml') ) nav2_param_path = launch.substitutions.LaunchConfiguration( 'param_file', default=os.path.join(fishrobot_navigatiob2_dir, 'config', 'nav2_params.yaml') ) return launch.LaunchDescription([ # 声明新的Launch参数 launch.actions.DeclareLaunchArgument( 'use_sim_time', default_value=use_sim_time, description='Use simulation (Gazebo) clock if true' ), launch.actions.DeclareLaunchArgument( 'map', default_value=map_yaml_path, description='Full path to map file to load' ), launch.actions.DeclareLaunchArgument( 'params_file', default_value=nav2_param_path, description='Full path to param file to load' ), launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [nav2_bringup_dir, '/launch', '/bringup_launch.py'] ), # 使用launch参数替换原有参数 launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path }.items(), ), launch_ros.actions.Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen', ) ])修改
CMakeList.txtcmake... install(DIRECTORY launch maps config DESTINATION share/${PROJECT_NAME} ) ...启动仿真和导航
bash# 启动仿真 ros2 launch fishbot_description gazebo_sim.launch.py # 启动导航 ros2 launch fishbot_description navigation2.launch.py
单点导航和路店导航
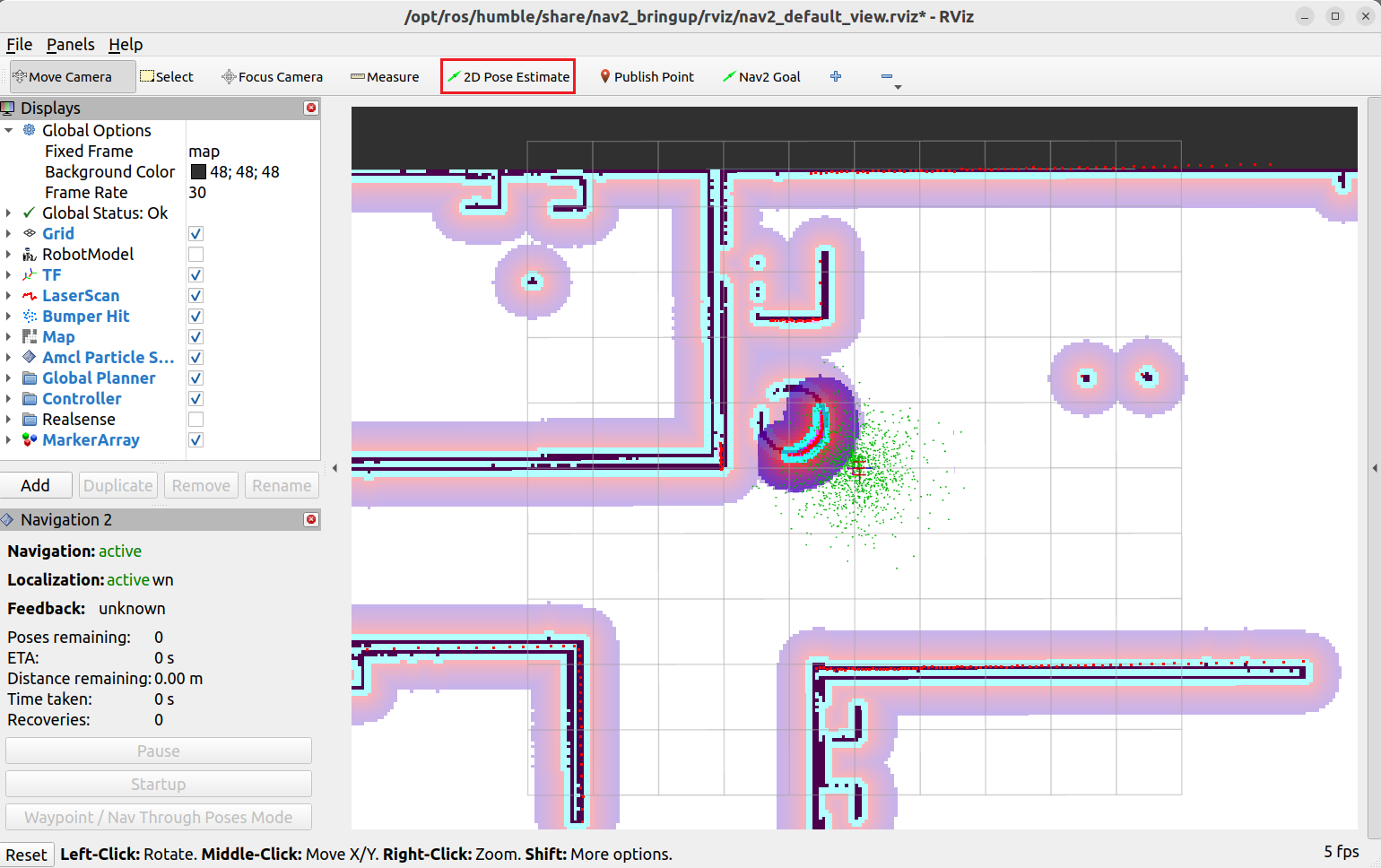
初始化机器人位置

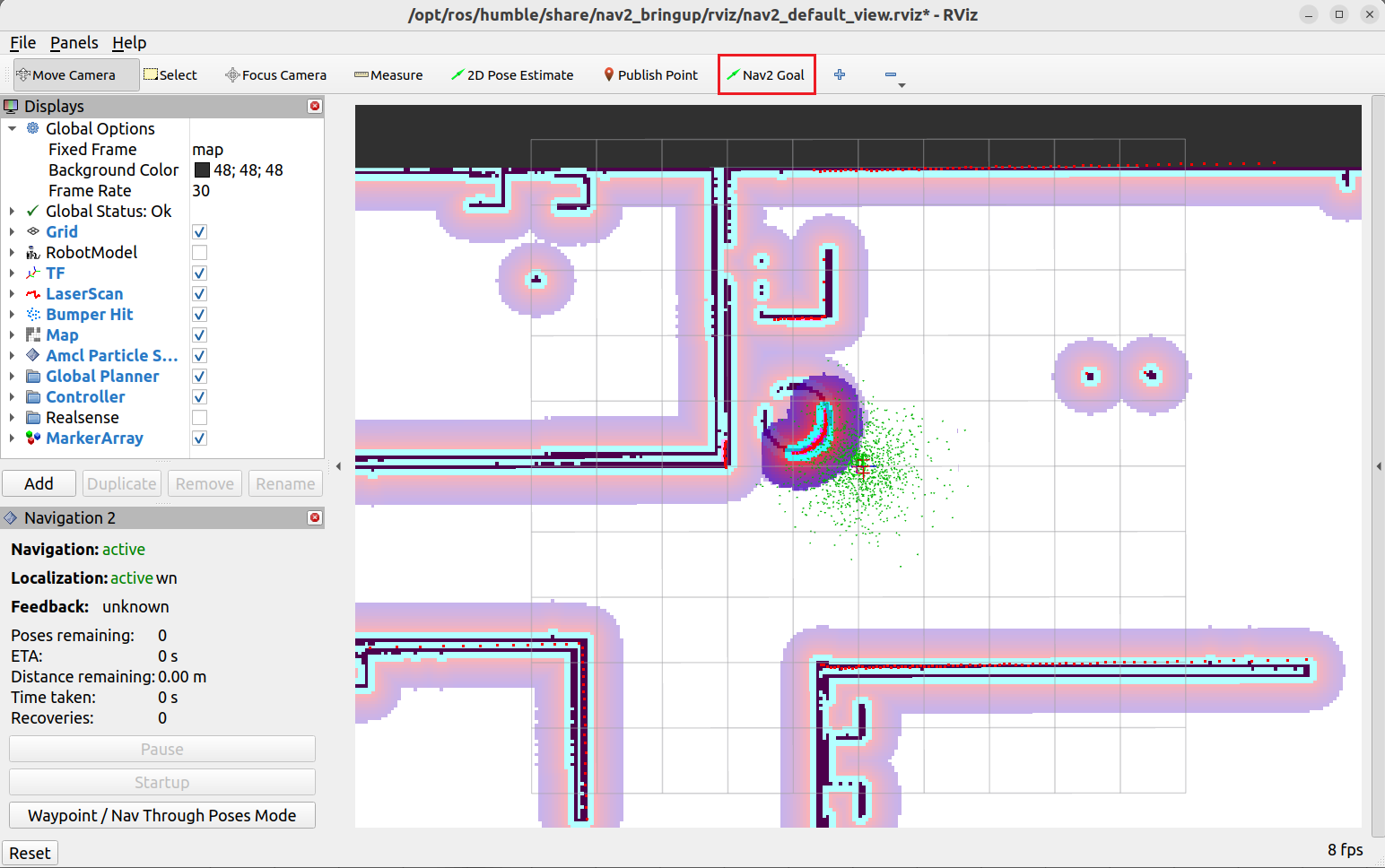
单点导航

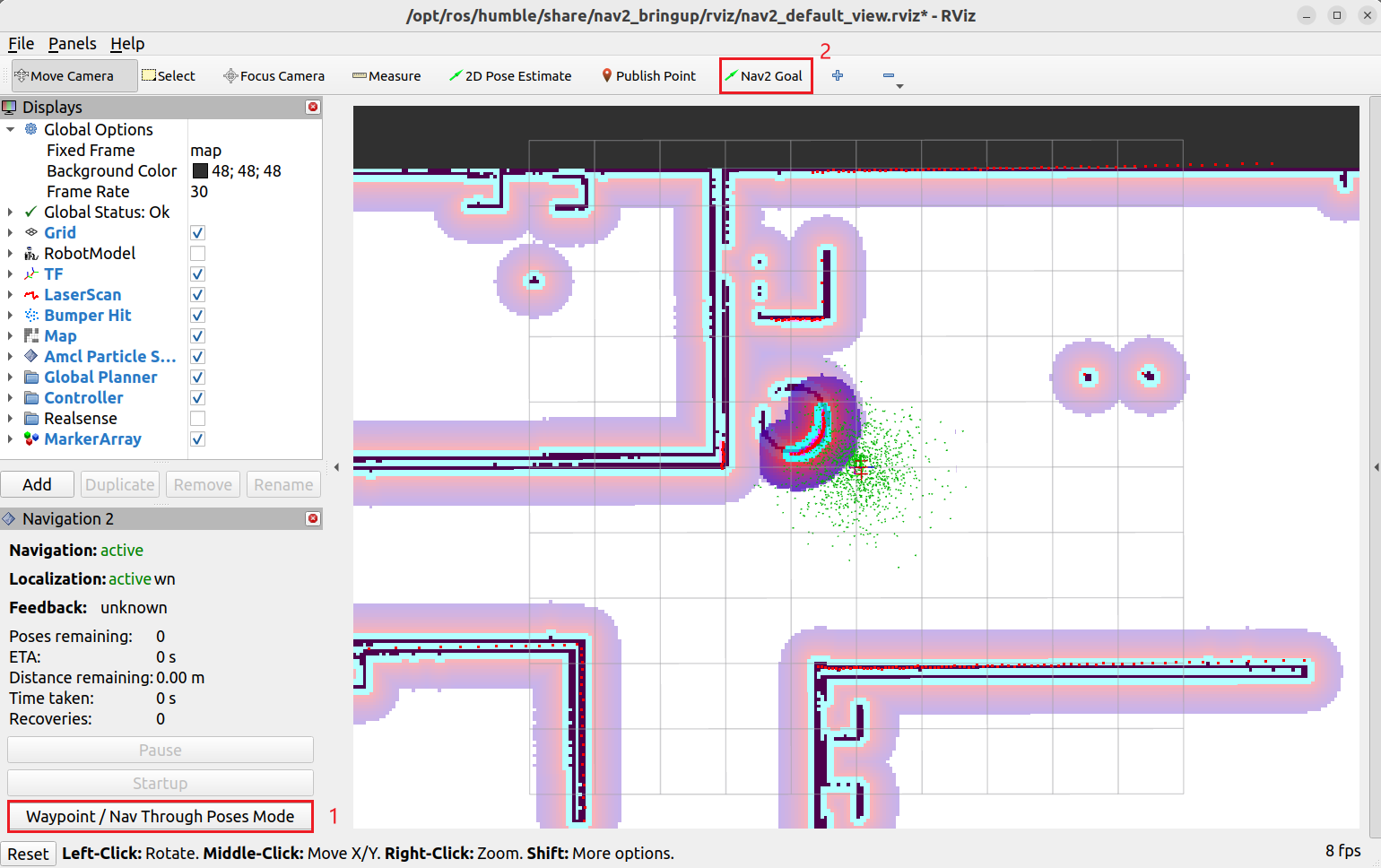
路点导航

设定完路点后,单击
Start Waypoint Following启动路点导航
优化导航速度和膨胀半径
修改
nav2_params.yaml中的最大角速度和角加速度yamlcontroller_server: ros_parameters: ... FollowPath: ... max_vel_theta: 0.8 acc_lim_theta: 2.0修改
nav2_params.yaml中的膨胀半径yamllocal_costmap: local_costmap: ros_parameters: ... inflation_layer: ... inflation_radius: 0.24 global_costmap: global_costmap: ros_parameters: ... inflation_layer: ... inflation_radius: 0.24膨胀半径是代价地图中的一个参数,一般为机器人的直径大小
优化机器人到点精度
yamlcontroller_server: ros_parameters: ... general_goal_checker: ... xy_goal_tolerance: 0.15 yaw_goal_tolerance: 0.15 # DWB parameters FollowPath: ... xy_goal_tolerance: 0.15 ...xy_goal_tolerance:位置允许误差yaw_goal_tolerance:角度允许误差
3. 导航应用开发
使用话题初始化机器人位姿
pythonimport rclpy from geometry_msgs.msg import PoseStamped from nav2_simple_commander.robot_navigator import BasicNavigator def main(): rclpy.init() nav = BasicNavigator() initial_pose = PoseStamped() initial_pose.header.frame_id = 'map' initial_pose.header.stamp = nav.get_clock().now().to_msg() initial_pose.pose.position.x = 0.0 initial_pose.pose.position.y = 0.0 initial_pose.pose.orientation.w = 1.0 nav.setInitialPose(initial_pose) nav.waitUntilNav2Active() # 等待导航变为可用状态 rclpy.spin(nav) rclpy.shutdown()在使用
Navigation2导航时,机器人在地图中的位置是由amcl节点根据地图以及传感器数据进行实时计算的。在开始导航之前,需要通过话题告知amcl机器人的大致位置,amcl才会进行计算。bashros2 node info /amcl -------- /amcl Subscribers: /bond: bond/msg/Status /clock: rosgraph_msgs/msg/Clock /initialpose: geometry_msgs/msg/PoseWithCovarianceStamped /map: nav_msgs/msg/OccupancyGrid /parameter_events: rcl_interfaces/msg/ParameterEvent /scan: sensor_msgs/msg/LaserScan Publishers: /amcl/transition_event: lifecycle_msgs/msg/TransitionEvent /amcl_pose: geometry_msgs/msg/PoseWithCovarianceStamped /bond: bond/msg/Status /parameter_events: rcl_interfaces/msg/ParameterEvent /particle_cloud: nav2_msgs/msg/ParticleCloud /rosout: rcl_interfaces/msg/Log /tf: tf2_msgs/msg/TFMessage Service Servers: /amcl/change_state: lifecycle_msgs/srv/ChangeState /amcl/describe_parameters: rcl_interfaces/srv/DescribeParameters /amcl/get_available_states: lifecycle_msgs/srv/GetAvailableStates /amcl/get_available_transitions: lifecycle_msgs/srv/GetAvailableTransitions /amcl/get_parameter_types: rcl_interfaces/srv/GetParameterTypes /amcl/get_parameters: rcl_interfaces/srv/GetParameters /amcl/get_state: lifecycle_msgs/srv/GetState /amcl/get_transition_graph: lifecycle_msgs/srv/GetAvailableTransitions /amcl/list_parameters: rcl_interfaces/srv/ListParameters /amcl/set_parameters: rcl_interfaces/srv/SetParameters /amcl/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically /reinitialize_global_localization: std_srvs/srv/Empty /request_nomotion_update: std_srvs/srv/Empty /set_initial_pose: nav2_msgs/srv/SetInitialPose Service Clients: Action Servers: Action Clients:使用
TF监听机器人的位置信息pythonimport rclpy from rclpy.node import Node import rclpy.time from tf2_ros import TransformListener, Buffer from tf_transformations import euler_from_quaternion class GetRobotPose(Node): def __init__(self): super().__init__('get_robot_pose') self.buffer = Buffer() self.listener = TransformListener(self.buffer, self) self.timer = self.create_timer(1, self.get_transform) def get_transform(self): try: tf = self.buffer.lookup_transform( 'map', 'base_footprint', rclpy.time.Time(seconds=0), rclpy.time.Duration(seconds=1) ) transform = tf.transform roatation_euler = euler_from_quaternion([ transform.rotation.x, transform.rotation.y, transform.rotation.z, transform.rotation.w ]) self.get_logger().info(f'平移: {transform.translation},旋转四元数: {transform.rotation},旋转欧拉角: {roatation_euler}') except Exception as e: self.get_logger().info(f'获取坐标变换失败,原因: {str(e)}') def main(): rclpy.init() node = GetRobotPose() rclpy.spin(node) rclpy.shutdown()调用接口进行单点导航
查看
nav2动作列表pythonros2 action list -t ----- /assisted_teleop [nav2_msgs/action/AssistedTeleop] /backup [nav2_msgs/action/BackUp] /compute_path_through_poses [nav2_msgs/action/ComputePathThroughPoses] /compute_path_to_pose [nav2_msgs/action/ComputePathToPose] /drive_on_heading [nav2_msgs/action/DriveOnHeading] /follow_path [nav2_msgs/action/FollowPath] /follow_waypoints [nav2_msgs/action/FollowWaypoints] /navigate_through_poses [nav2_msgs/action/NavigateThroughPoses] /navigate_to_pose [nav2_msgs/action/NavigateToPose] /smooth_path [nav2_msgs/action/SmoothPath] /spin [nav2_msgs/action/Spin] /wait [nav2_msgs/action/Wait]/navigate_to_pose:用于处理导航到点请求的动作查看动作的详细信息
pythonros2 action info /navigate_to_pose -t ------ Action: /navigate_to_pose Action clients: 4 /bt_navigator [nav2_msgs/action/NavigateToPose] /waypoint_follower [nav2_msgs/action/NavigateToPose] /rviz2 [nav2_msgs/action/NavigateToPose] /rviz_navigation_dialog_action_client [nav2_msgs/action/NavigateToPose] Action servers: 1 /bt_navigator [nav2_msgs/action/NavigateToPose]上述信息中包含动作的客户端、服务端以及消息接口的情况
查看消息接口定义
pythonros2 interface show nav2_msgs/action/NavigateToPose ------- #goal definition geometry_msgs/PoseStamped pose std_msgs/Header header builtin_interfaces/Time stamp int32 sec uint32 nanosec string frame_id Pose pose Point position float64 x float64 y float64 z Quaternion orientation float64 x 0 float64 y 0 float64 z 0 float64 w 1 string behavior_tree --- #result definition std_msgs/Empty result --- #feedback definition geometry_msgs/PoseStamped current_pose std_msgs/Header header builtin_interfaces/Time stamp int32 sec uint32 nanosec string frame_id Pose pose Point position float64 x float64 y float64 z Quaternion orientation float64 x 0 float64 y 0 float64 z 0 float64 w 1 builtin_interfaces/Duration navigation_time int32 sec uint32 nanosec builtin_interfaces/Duration estimated_time_remaining int32 sec uint32 nanosec int16 number_of_recoveries float32 distance_remaining动作消息的接口分为
目标、结果和反馈三个部分使用代码请求导航到目标点
pythonimport rclpy from rclpy.duration import Duration from geometry_msgs.msg import PoseStamped from nav2_simple_commander.robot_navigator import BasicNavigator, TaskResult def main(): rclpy.init() nav = BasicNavigator() # 等待导航变为可用状态 nav.waitUntilNav2Active() # 设置目标点坐标 goal_pose = PoseStamped() goal_pose.header.frame_id = 'map' goal_pose.header.stamp = nav.get_clock().now().to_msg() goal_pose.pose.position.x = 1.0 goal_pose.pose.position.y = 1.0 goal_pose.pose.orientation.w = 1.0 # 发送目标点并接收反馈结果 nav.goToPose(goal_pose) while not nav.isTaskComplete(): feedback = nav.getFeedback() nav.get_logger().info(f'预计: {Duration.from_msg(feedback.estimated_time_remaining).nanoseconds / 1e9}s 后到达') # 超时自动取消 if Duration.from_msg(feedback.navigation_time) > Duration(seconds=600.0): nav.cancelTask() # 导航结果判断 result = nav.getResult() if result == TaskResult.SUCCEEDED: nav.get_logger().info(f'导航结果: 成功') if result == TaskResult.CANCELED: nav.get_logger().warn(f'导航结果: 取消') if result == TaskResult.FAILED: nav.get_logger().error(f'导航结果: 失败') else: nav.get_logger().error(f'导航结果: 反回状态无效')
调用接口完成路点导航
查看路点跟随动作服务
bashros2 action info /follow_waypoints -t -------- Action: /follow_waypoints Action clients: 2 /rviz2 [nav2_msgs/action/FollowWaypoints] /rviz2 [nav2_msgs/action/FollowWaypoints] Action servers: 1 /waypoint_follower [nav2_msgs/action/FollowWaypoints]查看消息接口定义
bashros2 interface show nav2_msgs/action/FollowWaypoints --------- #goal definition geometry_msgs/PoseStamped[] poses std_msgs/Header header builtin_interfaces/Time stamp int32 sec uint32 nanosec string frame_id Pose pose Point position float64 x float64 y float64 z Quaternion orientation float64 x 0 float64 y 0 float64 z 0 float64 w 1 --- #result definition int32[] missed_waypoints --- #feedback definition uint32 current_waypoint使用代码调用路点导航服务
pythonimport rclpy from rclpy.duration import Duration from geometry_msgs.msg import PoseStamped from nav2_simple_commander.robot_navigator import BasicNavigator, TaskResult def main(): rclpy.init() nav = BasicNavigator() # 等待导航变为可用状态 nav.waitUntilNav2Active() # 设置目标路点 waypoints = [] goal_pose1 = PoseStamped() goal_pose1.header.frame_id = 'map' goal_pose1.header.stamp = nav.get_clock().now().to_msg() goal_pose1.pose.position.x = 0.0 goal_pose1.pose.position.y = 0.0 goal_pose1.pose.orientation.w = 1.0 waypoints.append(goal_pose1) goal_pose2 = PoseStamped() goal_pose2.header.frame_id = 'map' goal_pose2.header.stamp = nav.get_clock().now().to_msg() goal_pose2.pose.position.x = 2.0 goal_pose2.pose.position.y = 0.0 goal_pose2.pose.orientation.w = 1.0 waypoints.append(goal_pose2) goal_pose3 = PoseStamped() goal_pose3.header.frame_id = 'map' goal_pose3.header.stamp = nav.get_clock().now().to_msg() goal_pose3.pose.position.x = 2.0 goal_pose3.pose.position.y = 2.0 goal_pose3.pose.orientation.w = 1.0 waypoints.append(goal_pose3) # 调用路点导航服务 nav.followWaypoints(waypoints) # 判断结束及获取反馈 while not nav.isTaskComplete(): feedback = nav.getFeedback() nav.get_logger().info(f'当年目标路点标号: {feedback.current_waypoint}') # 导航结果判断 result = nav.getResult() if result == TaskResult.SUCCEEDED: nav.get_logger().info(f'导航结果: 成功') if result == TaskResult.CANCELED: nav.get_logger().warn(f'导航结果: 取消') if result == TaskResult.FAILED: nav.get_logger().error(f'导航结果: 失败') else: nav.get_logger().error(f'导航结果: 反回状态无效')
贡献者
 shine-tong
shine-tong